京都鉄道博物館は19日、「多機能鉄道重機(零式人機 ver.2.0)」の特別展示が始まることを受け、デモンストレーションの模様を報道関係者らに公開した。10月2日までの展示期間中、9月23~25日と10月1~2日にデモンストレーションを行う予定となっている。
-

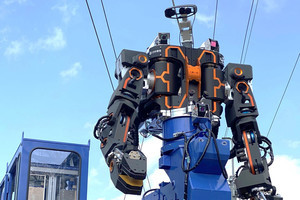
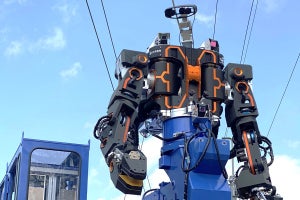
京都鉄道博物館に「多機能鉄道重機(零式人機ver.2.0)」が登場。デモンストレーションでは、人型ロボットが器用に棒を操った

多機能鉄道重機は、鉄道の電気設備作業を行う人型重機ロボット「零式人機 ver.2.0」(JR西日本、人機一体、日本信号の3社が共同開発)と鉄道工事用車両を融合させた新たな重機である。高所作業は人に頼ることが多く、安全とは言いきれない環境といえる。多機能鉄道重機を用いることで、人が安全な場所からロボットを操作でき、安全かつ効率的に作業を行えるようになる。
人間のような形をしたロボット「零式人機 ver.2.0」は、2本のアームと頭部に取り付けたカメラで作業を進める。操縦者はVRゴーグルを装着し、ロボット操縦席で操作する。ロボットにかかる力の感覚を操縦者が感じることのできる独自のバイラテラル制御技術も搭載。ロボットが重い物を持つと、操縦桿に重さが伝わるしくみだという。
デモンストレーションは京都鉄道博物館の本館1階「車両のしくみ / 車両工場」エリアにて、多くの親子連れが見守る中で行われた。代表の子がロボットに棒を渡すと、ロボットは2本のアームを駆使し、棒を持ち替えるなど、まるで人間のような動きを見せた。



人型重機ロボットと鉄道工事用車両を融合させた「多機能鉄道重機(零式人機 ver.2.0)」。2本のアームを駆使して棒を持ち替え、特製の大型きっぷに鋏を入れる場面もあった



続いて、代表の子がロボットに大型のきっぷを渡す。ロボットは頭部カメラで確認した後、アームで鋏を入れた。2つのデモンストレーションにかかった時間は計10分ほど。いずれも独自の力制御技術により、難なく作業をこなした様子だった。会場に集まった親子連れも、多機能鉄道重機の動きを興味深そうに観察していた。
ところで、なぜ多機能鉄道重機は人型ロボットになったのだろうか。担当者の説明によると、多機能鉄道重機は汎用性のあるロボットをめざし、2本以上のアームが必要との結論に至ったという。一方、高所作業を行う環境下で、スリムな形を実現しつつ、カメラも設置しなければならない。そこで頭部にカメラを設置し、2本のアームを取り付けた結果として、人型ロボットになったとのことだった。現在、2024年春の実用化をめざし、試験が進められている。
-

ロボットの頭部にカメラを搭載
-
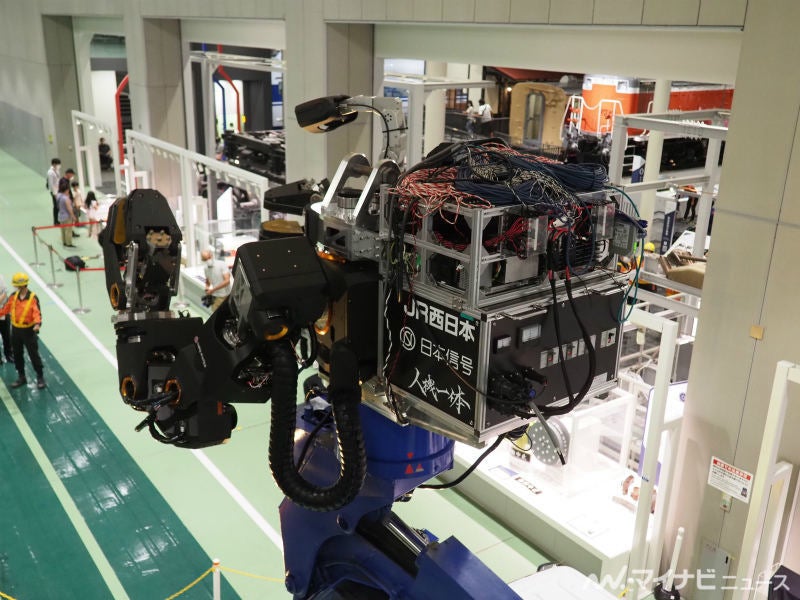
ロボットの後部
-
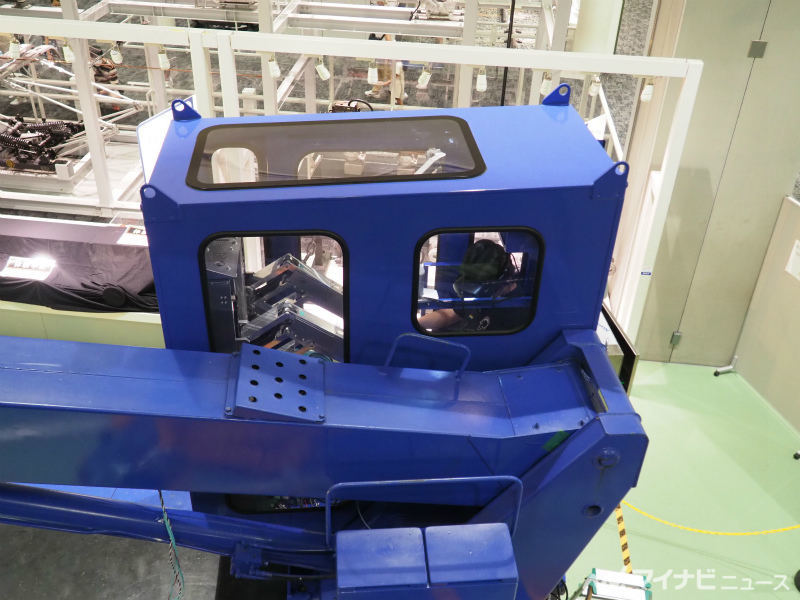
操縦者はVRゴーグルを装着して操作する



-

多機能鉄道重機の後部
-
操縦席の様子が映し出される
-

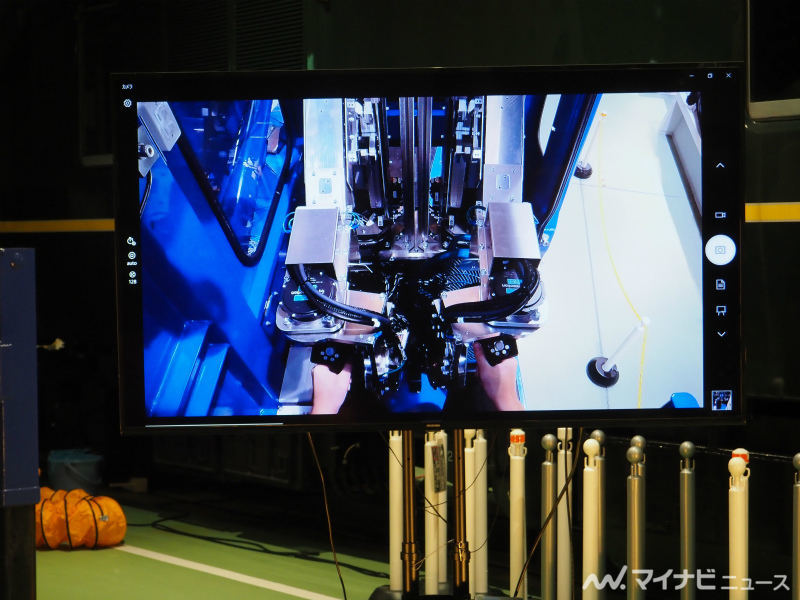
ロボットに搭載されたカメラからの映像も映し出された



「多機能鉄道重機(零式人機 ver.2.0)」の特別展示は10月2日まで、本館1階「車両のしくみ/車両工場エリア」で開催。デモンストレーションは9月23~25日と10月1~2日の各日とも、11時・13時・14時30分・15時30分からの4回(所要時間約15分)行われる。
9月24日14時から、本館3階ホールにて「多機能鉄道重機の開発の経緯 ; 鉄道用重機は人型ロボットであるべきか?」をテーマに講演会も開催。人機一体代表取締役社長の金岡博士氏らを招き、開発の経緯や多機能鉄道重機に実装している技術など紹介する。講演会の参加方法は京都鉄道博物館のサイトにて発表するとのこと。