

東武鉄道は31日、鉄道の自動運転(GoA3)の実現に向けた検証の一環として、同社の日光線、鬼怒川線、宇都宮線を走行する営業列車に前方障害物検知システムを仮設搭載し、11月1日から検証試験を開始すると発表した。

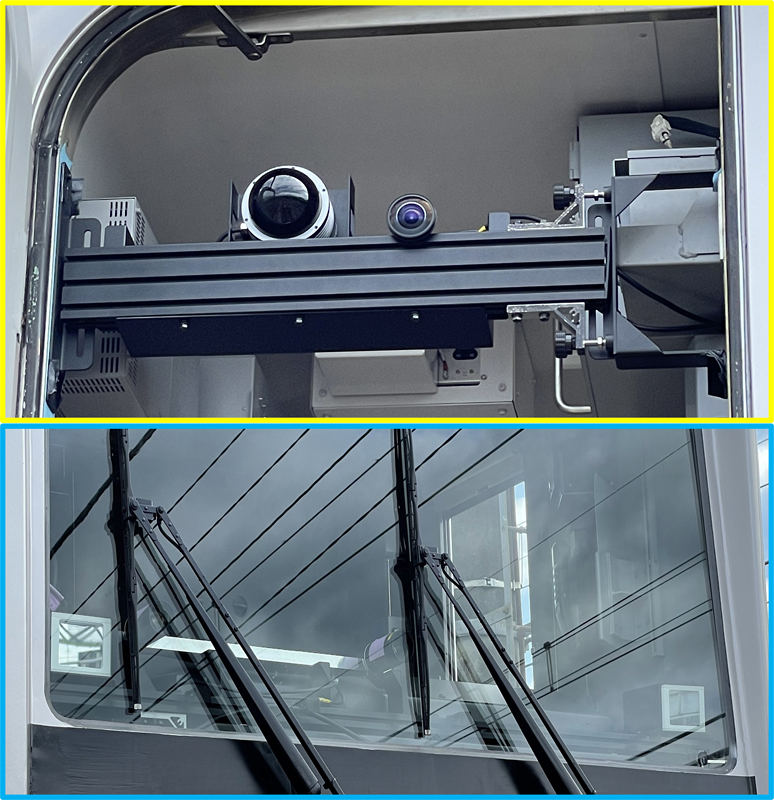
試験車両は20400型。黄色で囲った部分に魚眼カメラと検知センサ、青で囲った部分に検知センサとステレオカメラを搭載


鉄道は一般の交通と隔てられた専用敷地内の運行が前提であるものの、自動運転を実現するには総合的な安全性の確保が必要になる。東武鉄道はこれまで、車上カメラ・検知センサ(LiDAR)を統合した前方障害物検知システムの車両搭載を検討するため、訓練線で検証試験を実施してきた。
検証をより実用化の段階に進めるべく、日立製作所と共同で、営業列車の一部車両に前方障害物検知システムを仮設搭載し、運行時間帯や天候等の環境の変化に応じた障害物の有無と、その位置を正確に検知するための試験を開始する。なお、営業列車は通常と同様、運転士による操作で運行される。
鉄道の自動運転(GoA3)の実現に向けてこの試験を継続し、データを蓄積することで、障害物検知性能の向上を図る。国土交通省による「鉄道における自動運転技術検討会」のとりまとめ内容を踏まえ、その他の課題解決に向けても検証を進めるとしている。
-
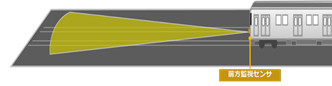
前方障害物検知システムによる試験(イメージ図)

検証試験が行われる区間は、東武鉄道の日光線(南栗橋~東武日光間)、鬼怒川線(下今市~新藤原間)、宇都宮線(新栃木~東武宇都宮間)。20400型車両1編成が試験車両に使用される。



