この宇宙・航空ニュースのまとめ
-
LEV-2が実際に月面を移動したことを裏付ける2枚目の月面画像を新たに公開
-
独自の形態変化の仕組みにより、手のひらサイズの超小型ローバでも月面を移動可能なことを明らかにした
-
地上からの遠隔操作に頼らず、自ら判断して移動・撮影・通信する自律制御技術を実証
-
低コスト・短期間で開発可能な超小型ロボットによる新しい宇宙探査の可能性を示した
2024年1月に小型月着陸実証機「SLIM」から離れて月面に到達した、世界最小・最軽量の月面探査ロボット「LEV-2」(愛称:SORA-Q)。その研究成果をまとめた論文が、アメリカの国際学術誌「Science Robotics」(Vol 11, Issue 115)に掲載され、掲載号の表紙を飾った。
-

LEV-2がフロントカメラで撮影した月面の画像。赤枠は月面で着陸機を検出した結果を示しており、画像処理アルゴリズムが月面でも正常に動作したことを裏付けている (C)JAXA/タカラトミー/ソニーグループ(株)/同志社大学 出所:JAXAニュースリリース

この研究では、手のひらサイズのLEV-2が実際に月面を移動したことを裏付ける2枚目の画像を新たに公開し、LEV-2自身の判断で動ける自律制御技術を実証。低コスト・短期間で開発可能な超小型ロボットによる新しい宇宙探査の可能性を示すものと説明している。
宇宙航空研究開発機構(JAXA)、タカラトミー、ソニーグループ、同志社大学の共同開発によって生まれたLEV-2に関する研究の詳細については、前出の通りScience Roboticsに、6月10日(日本時間6月11日午前3時)付で掲載されている。
研究概要と背景
LEV-2(Lunar Excursion Vehicle 2)は、直径78mmの球体から自動で展開し、車輪で移動できる変形型月面ロボット(質量228g)。地上から操作しなくても、自律的に周囲の撮影を行い、取得した画像を無線で送信できる点が大きな特徴だ。誤差10m以下のピンポイント着陸に成功した着陸機の様子をカメラに収め、地球へ送り届けたことで、大きな驚きと感動を人々にもたらしたことは記憶に新しい。
なお、SLIMにはLEV-2と共に「LEV-1」(Lunar Excursion Vehicle 1)という超小型月面探査ローバも搭載されており、2機合わせて世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査も達成している。
今回の研究では、小型ロボットで課題となる移動能力や処理能力の制約を克服するための機構設計と自律制御技術を提案し、月面でその有効性を実証したかたちだ。具体的な成果として大きく以下の3点を挙げ、あわせて新たな月面画像も公開している。


- 完全自律による月面探査の実証
- 変形機構・偏心車輪による移動機能の実証
- 実環境での動作データと知見の獲得
1. 完全自律による月面探査の実証
LEV-2は、着陸後に自ら起動・展開して姿勢を整え、着陸機から離れて移動しながら周囲を撮影。画像の中から重要なものを自ら選び、無線で送信するといった一連の動作を、すべて自律的に行った。これらの動作は、通信が限られる環境を前提として設計されており、地上からの遠隔操作に依存せずに実施されたものだ。
この結果、月面上から2枚の画像を取得することに成功。各所で大きく取り上げられた画像はフロントカメラで撮影されたもので、通信途中でデータが途絶えたために一部が欠けた状態ながら、着陸機とその周囲の様子が明瞭に捉えられ、月面での着陸状況を示す貴重なデータとなった。
テレメトリデータの解析から、LEV-2がオンボード画像処理により月面で着陸機を正しく認識していたことも確認。また、オフライン画像解析の結果、LEV-2が着陸機から約5.08m離れた位置から撮影したと推定され、計画通りの動作シーケンスが適切に実行されていたことが示されたとしている。
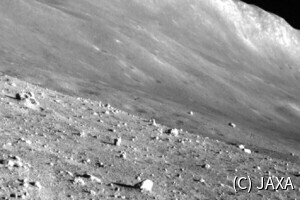
今回新たに公開した2枚目の画像は、リアカメラで撮影されたもの。通信途絶によるデータ欠損のため、復元できたのは左側部分のみとなっているが、月面環境や移動の根拠を示す重要な情報が含まれているという。
-

(A)LEV-2がリアカメラで撮影した月面の画像 (B)フロントカメラ画像(前出)をリアカメラ撮影時の視点に変更した投影画像。赤枠で示した範囲に共通する岩石が写っており、この情報をもとにLEV-2の移動・旋回量を推定。Aのデータ欠損部には、Bのように着陸機が写っていた可能性が高いと考えられる (C)JAXA/タカラトミー/ソニーグループ(株)/同志社大学 出所:JAXAニュースリリース

画像解析により生成した投影画像(フロントカメラ画像をリアカメラ撮影時の視点に変換したもの)と比較すると、画像2枚目の欠損した中央部分には着陸機が写っていた可能性が高いことが分かった。
また、テレメトリデータの解析から、LEV-2は月面で少なくとも約108分間動作し、その間にオンボード画像処理を240回実施したことも明らかになった。月面移動中には姿勢異常を検知し、姿勢を回復させる動作シーケンスが実行されたことも確認している。こうした解析の結果、超小型ロボットが厳しい通信制約下においても、自律的に判断して探査を実行し、その成果を取得・送信できることを実証した。
2. 変形機構・偏心車輪による移動機能の実証
LEV-2は、球体形状から展開して走行形態へ変形する独自の仕組みと、月面でも埋もれないように車輪を偏心回転させる特殊な機構を備えている。
今回取得された2枚の画像には、共通して写っている岩石があり、これを基準に画像解析を行った結果、2枚の画像を取得する間にLEV-2が約0.13m移動し、約180度旋回していることを確認。LEV-2が実際に月面上を移動・旋回したことが裏付けられたという。
これにより、提案した変形機構および車輪の偏心回転が、実際の月面環境において有効に機能し、超小型ロボットでも走行できることも実証した。
-

LEV-2の外観。左が収納状態で、右が展開状態 出所:JAXAニュースリリース

3. 実環境での動作データと知見の獲得
月面での運用では、通信の途切れやデータの一部欠損といった課題がみられたものの、LEV-2が備える異常検知機能や自己回復機能が実際に動作し、不具合に対して自律的に対応していたことも確認できたとのこと。
これらの結果から、実際の宇宙環境で小型ロボットを運用するための設計や地上試験に関する留意点、運用方法の改善点など、今後の探査ミッションに活用可能な具体的知見が得られたとしている。
今後の展開
今回の成果についてJAXAら4者は「小型ロボットによる宇宙探査の実現可能性を示す重要な一歩」とし、「この研究で得られた技術と知見は、将来の月・火星探査に加え、人類の宇宙活動の拡大に貢献することが期待される」とコメントしている。
また今後の展開としては、以下4点が期待されるとのこと。
- 複数の小型ロボットを同時に運用し、広範囲を効率的に探査する技術の発展
- 大型ローバと小型ロボットを組み合わせた柔軟な探査システムの実現
- 月や火星だけでなく、洞窟や急斜面などこれまで到達が難しかった環境への探査拡大
- 低コスト・短期間でのミッション実現による宇宙探査の加速