ispaceは、同社の事業戦略アップデートを3月27日に発表。これまで日米の拠点で開発が進められていた2機のランダーを、新たな「ULTRA」(ラテン語で"超越"の意味)に統合し、今後の月面着陸ミッションで使用していくことを明らかにした。また、自社の月周回衛星によって通信・測位サービスを提供するという新構想「ルナ・コネクト」を打ち出した。
-

新たに発表された「ULTRA」ランダー。外観は日本で開発していた「シリーズ3」ランダーに近い (C)ispace

大幅変更になった、ispaceのミッション計画を整理する
技術実証だった過去2回のミッションでは、同社初のランダーである「RESILIENCE」(旧シリーズ1)が使われてきたが、運用段階となるその後のミッションでは、一度により多くのペイロードを運べるよう大型化を計画。米国では「APEX1.0」(旧シリーズ2)、日本では「シリーズ3」と、日米の拠点でそれぞれランダーの開発が進められてきた。
-

日米それぞれで、2種類のランダーの開発が進められてきたが、それを統合する (C)ispace

同社の次の打ち上げは、APEX1.0を使用する2027年のミッション3となる予定だった。しかし、米Agile Space Industriesと共同開発し、メインエンジンとして使用することになっていた「VoidRunner」で遅延が発生。他社のエンジンで代替することが決まり、ミッション3の開発計画が見直されることになった。
-

新型エンジン「VoidRunner」の採用により、大幅な簡素化が期待されていたが…… (C)ispace

ispaceの氏家亮CTOによると、VoidRunnerは「エンジン性能が必要水準に達していない」という。こういった大型エンジンは発注から納品までの期間が長く、開発が年単位で遅れてしまうリスクがあるものの、これ以上の計画変更を避けるため、決断した。なお代替エンジンはすでに月面着陸での使用実績があり、信頼性の面ではメリットがある。
-

ispace CTOの氏家亮氏

一方、各国における月面開発の需要はさらに高まっており、同社の顧客からは、ミッションクオリティと開発効率を求める声が強くなっていたという。同社は戦略的な理由から、日米それぞれの顧客向けに別々のランダーを開発してきたが、両ランダーの統合を決定。それぞれの強みを活かしつつ、ランダー品質の最大化・最適化をめざすという。
-

ULTRAには、APEX1.0とシリーズ3の長所を取り込む (C)ispace

ランダーの統合により、開発体制も変更。設計部門は日米で統合し、氏家CTOの直下に集約する一方、組立・製造・試験や運用は従来通り、日米それぞれの拠点で行っていく。人員数・人員配置の最適化を進め、全社的なコスト低減もめざす。
-

ランダーの統合により、日米の開発体制は上図のように変更 (C)ispace

“統合”とは言うものの、外観を見て分かるように、ULTRAの設計のベースとなっているのは、過去2回のミッションで得た知見が最大限反映されているシリーズ3だ。事実上、APEX1.0の開発中止に近いが、APEX1.0の米国ミッションでは月を周回する中継衛星を使う計画だったため、通信系はAPEX1.0のものを採用しているとのこと。
搭載エンジンの変更、日米ランダーの統合というふたつの大きな変更の影響を最も大きく受けるのは、直近の米国ミッションだ。この結果、実施時期は2027年から2030年に延期。このミッションは、NASAのCLPSタスクオーダーCP-12に採択されているものだが、今後、NASAと契約内容の修正を行う予定だという。
その次は、経済産業省のSBIR補助金を活用して実施する日本ミッションだったが、こちらについては、2028年のまま変更はない。その結果、ミッションの順番が入れ替わり、同社の次の打ち上げは、この日本ミッションとなった。
ミッションの順番が変わったため、同社はナンバリングを再編。日本のふたつのミッションの実施時期に変更はないが、2028年の旧ミッション4が新ミッション3に、2029年の旧ミッション6が新ミッション4へと、ミッション番号を順番通りに付け直した。米国ミッションはこの次となり、新たにミッション5という名前になる。
-

かなりややこしいので間違えそうだが、上図のようにミッション番号が変わった (C)ispace

2027年にも通信サービス「ルナ・コネクト」提供開始へ
今回、もうひとつ発表されたのが、通信・測位のサービスを提供する「ルナ・コネクト」だ。今後、有人基地の建設など、月面活動が活発化していくときに、ニーズが高まると予測されるのが、地球ではお馴染みの通信や測位といった衛星サービス。ルナ・コネクトは、月周回軌道に投入する衛星を使って、これを提供するという構想だ。
-

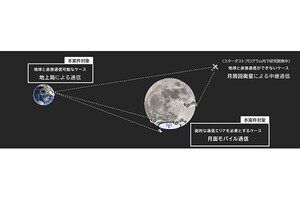
月周回衛星を活用したサービス。ルナ・コネクトは通信と測位を提供する (C)ispace

月は地球に常に同じ面を向けているため、裏側に行くときは、月を周回する衛星で通信を中継する必要がある。実際、同社の米国ミッションは南極の裏側に着陸するため、ランダーに中継衛星を搭載し、周回軌道で分離する計画だった。また、GPSのような測位サービスがあれば、ローバーの走行支援や基地建設など、さまざまな用途で活用できる。
月面での通信・測位システムについては、現在、米国(NASA)/欧州(ESA)/日本(JAXA)が国際的なフレームワークとして「LunaNet」構想の検討を共同で進めている。実際の開発・実証・運用は民間からのサービス調達が想定されており、ispaceのルナ・コネクトも、LunaNetに準拠する予定だ。
同社は2030年までに、5機以上の自社衛星を月周回軌道に投入する計画。同社は過去2回のミッションにおいて、いずれも月周回軌道への到達に成功したという実績があり、技術的には十分実現可能と言える。
ただ、同社の次のミッションだと前述の通り、2028年まで待つ必要があるため、その前にまず、米Argo Space Corp.の宇宙輸送サービスを利用して、衛星1機を打ち上げる。これをミッション2.5と位置づけ、早ければ2027年にも、通信サービスの提供を開始する予定だという。
その後は、2028年の新ミッション3で1機、2029年の新ミッション4で2機、2030年の新ミッション5および6で1機ずつ搭載。2030年前半をメドに、通信・測位サービスのトライアルを開始する予定だ。なお、月からの通信で利用する地上局の運用・利用については、KDDIと共同検討を進めているとのこと。
-

同社ミッションの現在の計画 (C)ispace

ispace月面着陸関連記事
- ispaceには何が足りなかったのか? 運用・開発・経営判断レベルで改善案
- ispaceが大型化した新型月着陸船の熱構造モデル公開 2028年打ち上げへ
- レーザーレンジファインダの問題はなぜ起きた? ispaceが着陸失敗原因を分析
- ispaceの月面着陸ミッション2は失敗。初成功は2027年以降に持ち越し
- ispaceの月着陸機は順調な船出。次なる関門は初挑戦の“月フライバイ”
- ispaceの月面ランダー「RESILIENCE」が打ち上げ成功、2回目の挑戦に出発
- ispaceが「RESILIENCE」ランダーを報道公開、月面に“家”を建てるペイロードも
- ispaceがミッション3を1年延期、月面ランダーは設計を一新し「APEX1.0」に
- ispaceの月面着陸失敗、理由はクレーター地形の影響でプログラムが誤動作か