宇宙航空研究開発機構(JAXA)は、国際宇宙ステーション(ISS)へ物資などを届ける新型宇宙ステーション補給機「HTV-X」1号機を、H3ロケット7号機に載せて10月21日に打上げる。7号機は、H3ロケット初の4本ブースターを備えた“24形態”と呼ばれる構成で、種子島宇宙センター 大型ロケット発射場から飛び立つ。
【更新・追記】H3ロケット7号機の打上げは10月26日9時00分15秒に延期された。
-

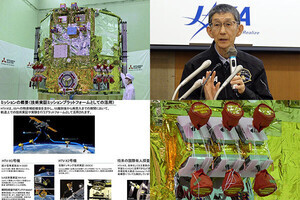
HTV-X 1号機のサービスモジュール本体(2024年、三菱電機 鎌倉製作所にて編集部撮影)

-

H3ロケットの24形態(H3-24W)。重量級のペイロードを宇宙へ運べるよう、第1段メインエンジン(LE-9)2基、固体ロケットブースター(SRB-3)4本を備えているのが特徴だ。なお、最上段の衛星フェアリングはペイロードに応じてS(ショート)やロング(L)を用意しているが、7号機ではHTV-XのためにW(ワイド)型のフェアリングを採用している
出所:JAXA「2025年度ロケット打上げ計画書 新型宇宙ステーション補給機1号機(HTV-X1)/H3ロケット7号機(H3・F7)」PDFより

HTV-X 1号機を載せたH3ロケット7号機は、10月21日10時58分頃に打上げ予定で、最新のISSの軌道により決定。予備期間は10月22日~11月30日まで設定しており、予備期間中の打上げ日及び時刻については、ISSの運用に係る国際調整により決定する。
JAXAでは打上げの模様をYouTube公式チャンネル「JAXA Channel」とドワンゴの「ニコニコ生放送」でライブ中継する。また、HTV-X1のキャプチャ(把持)や、ISSからの離脱についてもライブ中継を予定しているとのこと。
-

1/35スケールのHTV-Xの模型

HTV-X 1号機はISSに接近した後、ISS側のロボットアームに把持されてドッキングすることになっており、現在ISSに滞在中の油井亀美也宇宙飛行士がその役目を担当することが決まった。
HTV-XがISSへ接近する際に使用するPROXと呼ばれる装置のチェックをしました。
— 油井 亀美也 Kimiya.Yui (@Astro_Kimiya) October 8, 2025
HTV-XをISSへ迎える準備も着々と進んでいます。
ここでニュースです。こうのとり君の時と同様に今回もアームを操作して把持する担当にアサインされました。
責任重大ですが、皆と協力して確実に任務を遂行します! pic.twitter.com/hSA94NVxdz
HTV-Xは、主ミッションであるISSへの物資輸送能力を従来機「こうのとり」(HTV)よりも強化した無人補給機。側面に翼のように大きく展開する太陽電池パドルを新たに備えたほか、通信系や電力系、推進系、曝露カーゴ部に至るまで各部を刷新している。ISSへのランデブー誘導制御方式は従来のHTVの実績を継承。2号機からは自動ドッキング制御機能を追加し、さらに自律飛行を可能にする予定だ。
軌道上での技術実証への拡張や、将来の宇宙探査への適用も想定しており、HTV-X全体もしくは主要部の技術を、今後の有人宇宙ミッションに活用できるように開発した点も大きな特徴。将来的には、月周回有人拠点(Gateway)への物資補給構想についても検討中だ。
HTV-Xの詳細については、開発を担当した三菱電機によるHTV-Xサービスモジュール機体公開時のレポート記事(執筆:大塚実氏)を参照のこと。

-

HTV-X 1号機はISSよりも低い軌道からISSに近づき、ロボットアームで掴んでもらってドッキングする