


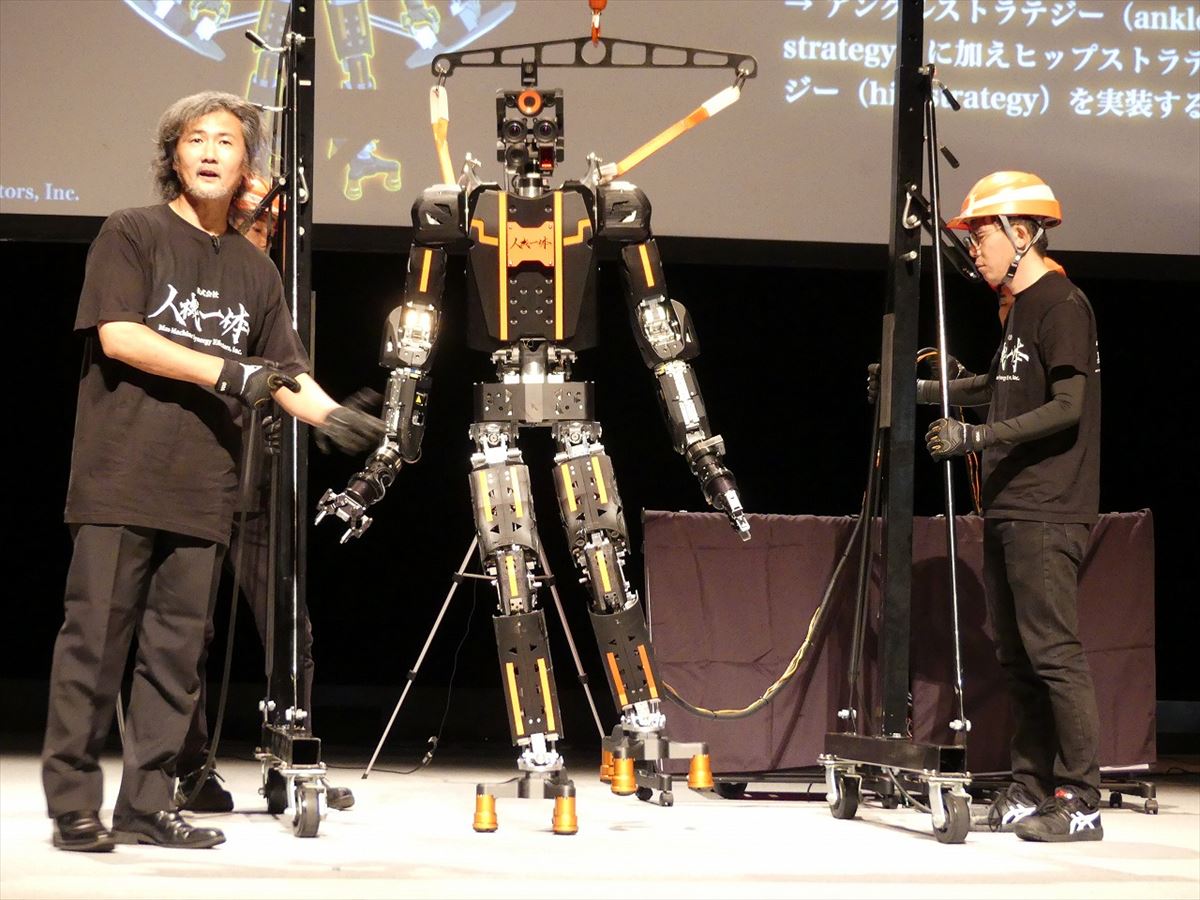
人機一体は8月1日、本社を置く滋賀県草津市において、ヒューマノイドロボット「零一式カレイド ver.1.1」を発表、動作デモを披露した。同ロボットはすでに「2023国際ロボット展」にて、上半身のみが動くver.1.0を発表していたが、今回、下半身の制御も実装。マスタースレーブ操縦方式による2足歩行が可能となった。
-
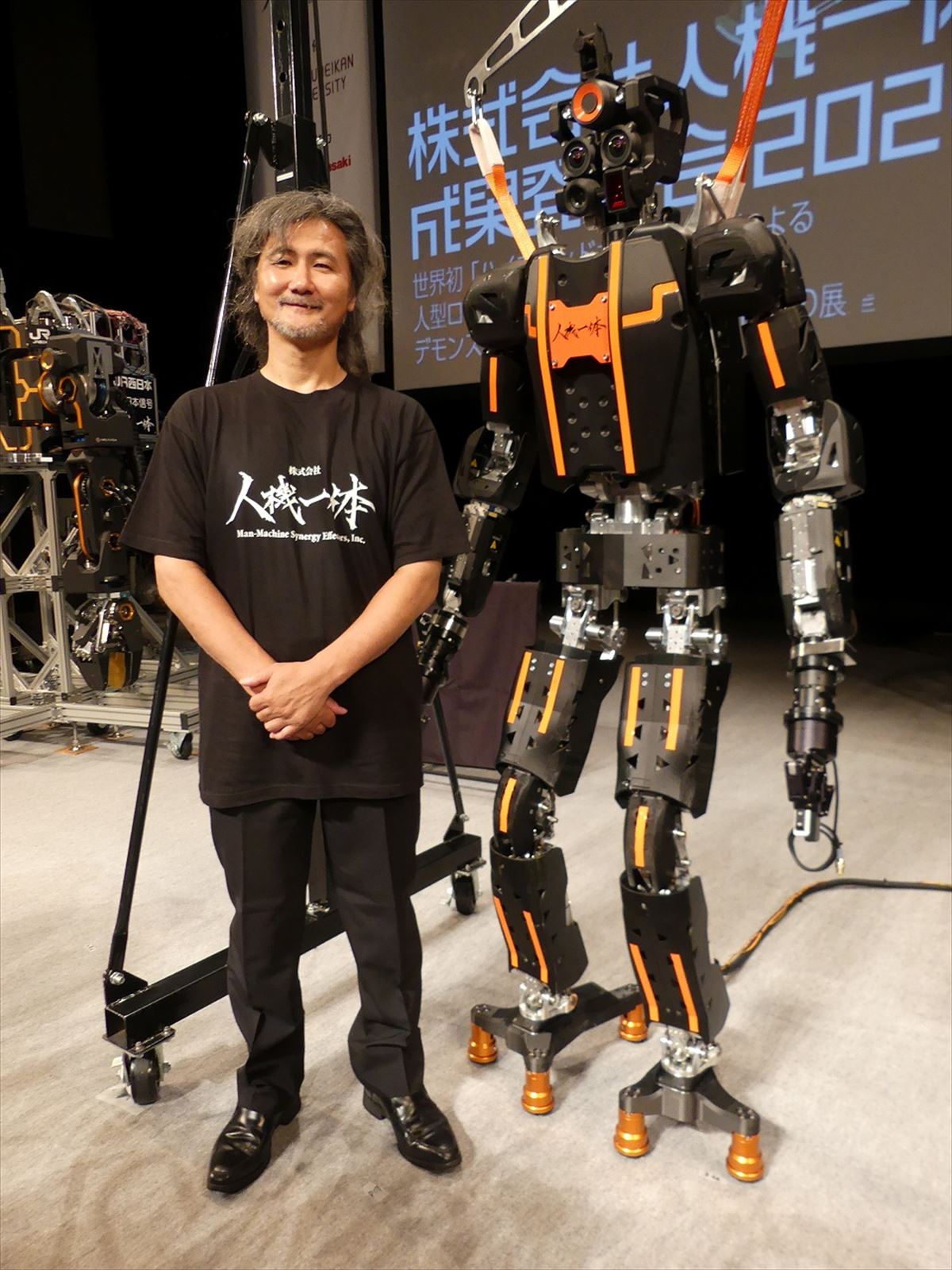
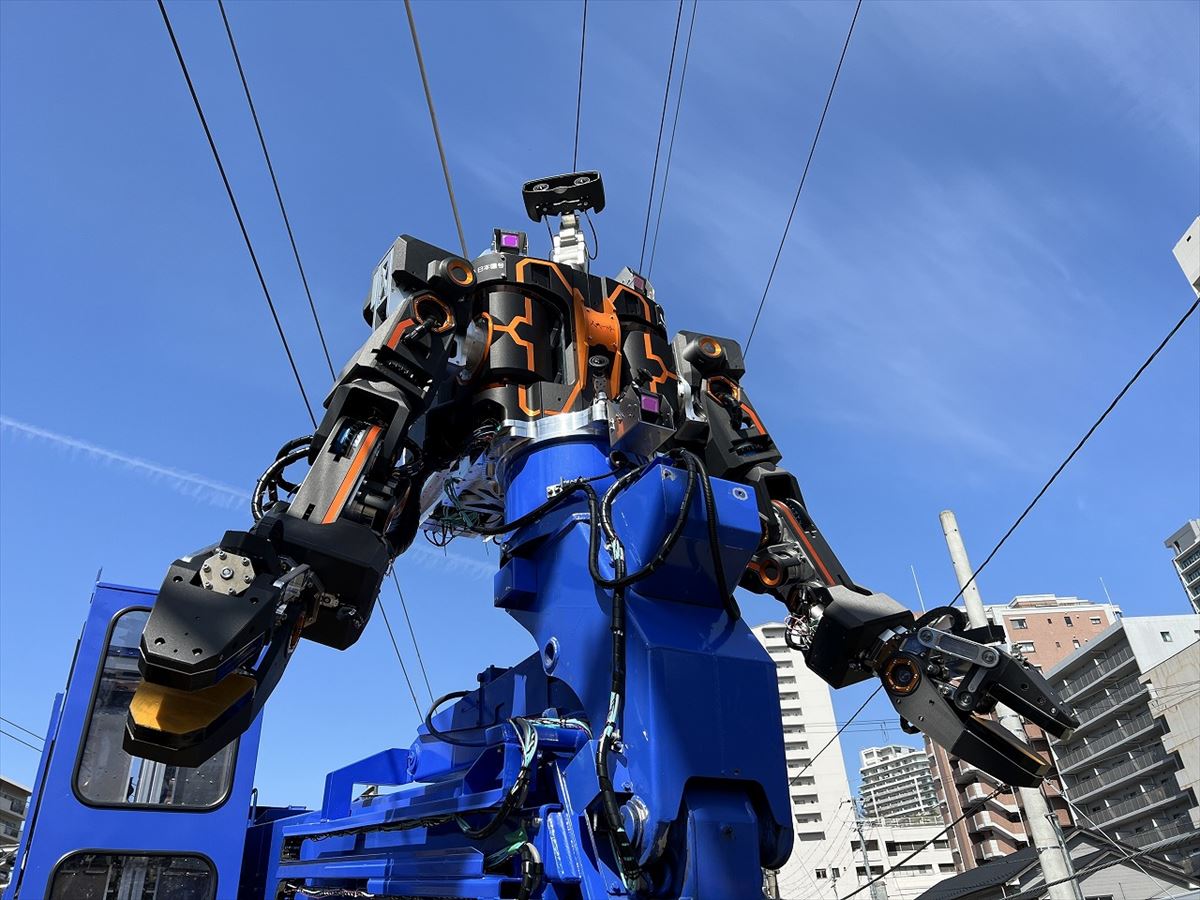
人機一体の「零一式カレイド ver.1.1」と、同社社長の金岡博士

新たにオートバランスを実装
零一式カレイドは、川崎重工業の等身大ヒューマノイドロボット「Kaleido」(カレイド)をベースに、同社がカスタマイズした機体である。零一式カレイドは、外装のカラーリングを一新したほか、頭部、ハンド、足などを換装。オリジナルの身長が約180cmだったのに対し、零一式カレイド ver.1.1は210cmと、かなり背が高くなった。
-
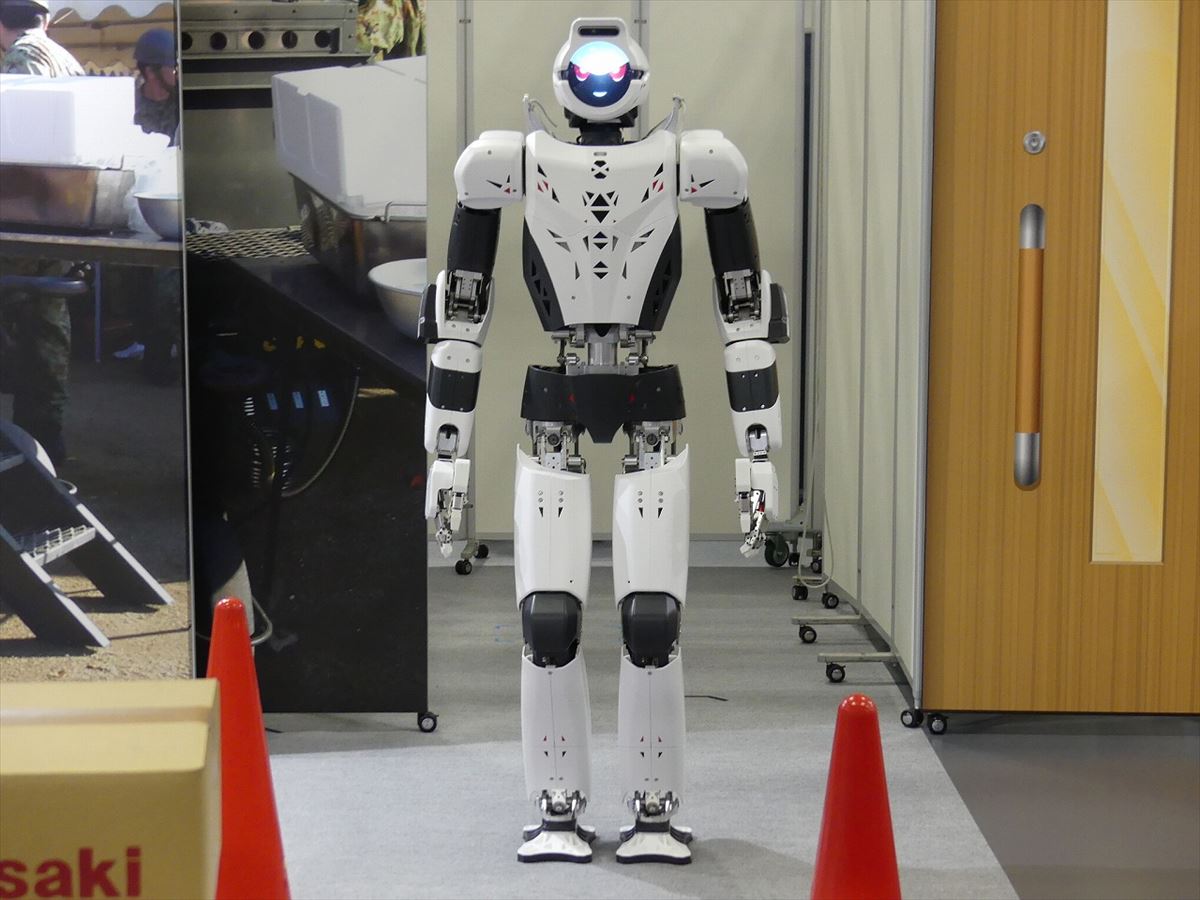
これはオリジナルの「Kaleido」。基本構造などは変わっていない

そのほか、制御ソフトウェアも同社のものに書き換えている。零一式カレイド ver.1.1で初めて導入したのは、「ハイブリッドオートバランス制御」(HABC)である。
同社のロボットで一貫しているのは、人間が操縦することだ。近年、AIの急速な発達により、分野によっては人間以上の能力を発揮するようになってきたが、そのほかの多くの分野では、人間の代わりになるにはまだまだ時間がかかる。それまでは、高度な判断は人間が行い、フィジカルな部分をロボットが担うのが現実的だ。
人間の操縦は、バイラテラル(双方向)のマスタースレーブにより行う。コントローラの動きをロボット側でトレースするだけでなく、ロボット側からのフィードバックもあるため、たとえばハンドが何か物体に当たった場合、それがコントローラ側の抵抗となって伝わり、操縦者はまるで自分の腕のような感覚で動かすことができる。
-
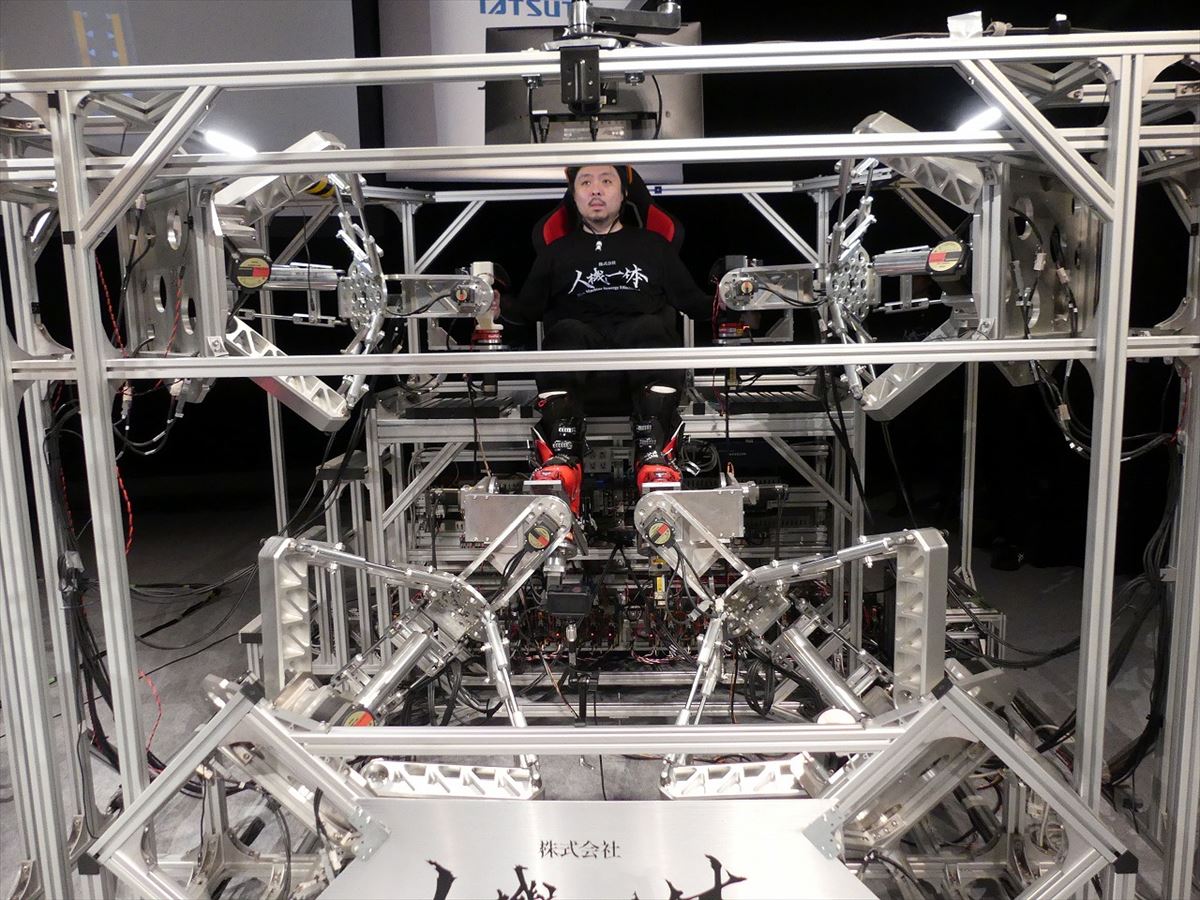
こちらが操縦席。両手両足を使ってロボットを動かす

ただ、2足歩行で難しいのは、片足を上げるため、本質的に転倒しやすいということだ。そこで今回、自律的にバランスを維持する「オートバランス制御」を実装。前述のHABCでは、人間による操作と、自律的なバランス制御を、力制御ベースで統合したという。
一般的な2足歩行技術では、路面状況などを各種センサーで計測し、脚をどう動かすかの歩行計画(軌道計画)をリアルタイムで計算することが多いが、同社社長の金岡博士によれば、零一式カレイドのバランス制御は、「ローレベルの反射機能だけ」を行っているという。
零一式カレイドの足裏には圧力センサーがあり、その計測結果により、足首を動かしてバランスを維持する(アンクルストラテジー)。左脚と右脚が個別に行っていて、左右の連携すら行っていないシンプルなものだが、それだけにロバストで拡張性が高い。今後、ヒップストラテジーも実装し、さらに性能を向上させる予定だという。
-
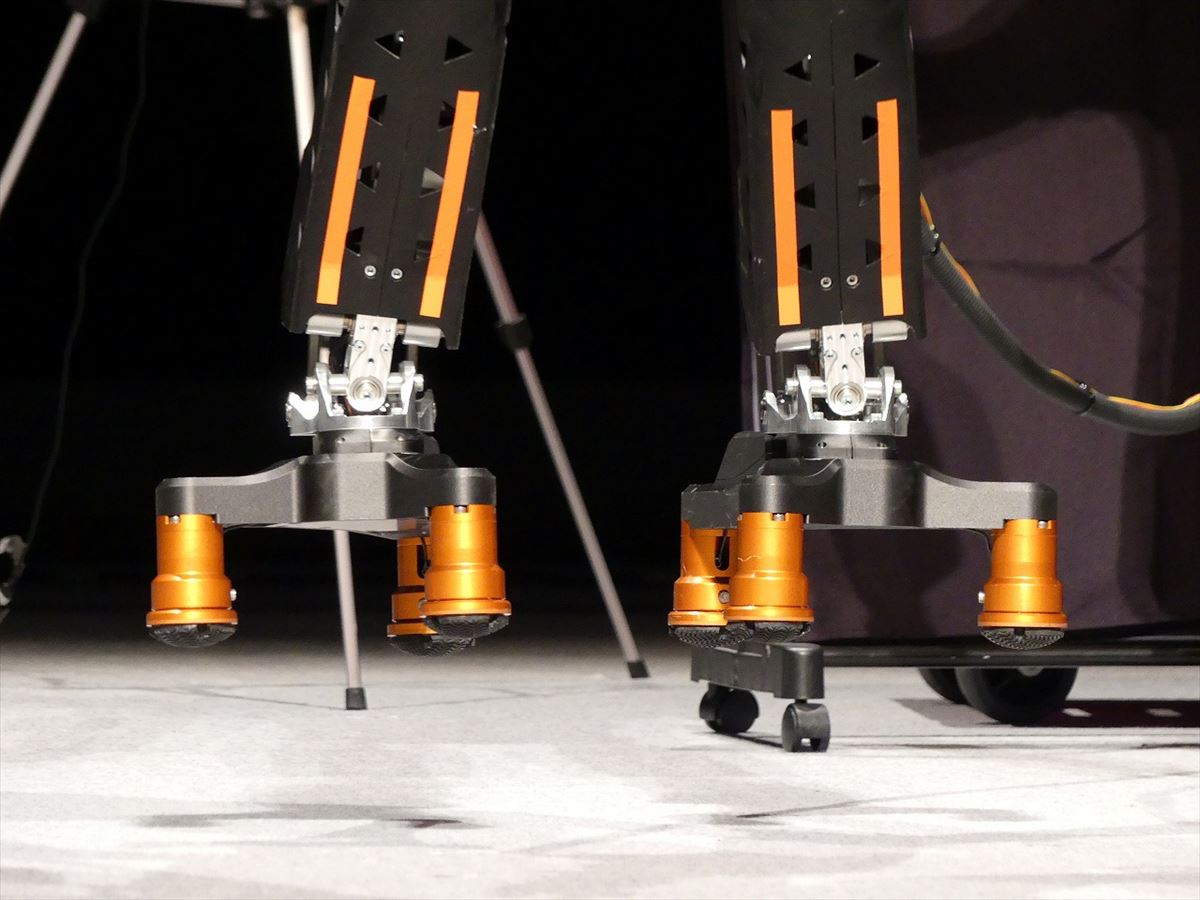
零一式カレイド ver.1.1の足。圧力センサーが3つずつ付いている

特に「歩行モーション」のようなものはなく、人間が左右の脚を前に動かす操作をすれば、ロボットが自動でバランスを維持して、前に歩くようなイメージだ。人間は自分で歩くとき、いちいちバランス制御を意識することはない。HABCは、そういう感覚的な意味でも、人間の歩行に近いと言えるだろう。
足首のモーターが焼けてしまったそうで、残念ながらこの日の動作デモは片足バランスのみとなってしまったが、同社からは、事前に撮影した歩行の動画が公開された。現時点では、8倍速でもまだゆっくりした速度であるものの、今後、制御をブラッシュアップし、高速化していく予定だ。
-
当日の動作デモでは、片足バランスが披露された

当日の片足バランス、操縦者の動き、事前の歩行の様子
次世代機のコンセプトが発表
そして、今後の開発ロードマップも明らかにされた。零一式カレイドは原理検証のためのPoC試作機だったが、「人型重機」として実用化を進めるために、次の段階では、社会実装コンセプトとしてのPoC試作機を2体開発するという。
-

人型重機の開発ロードマップ。次の新型機は……

今回、そのコンセプトスケッチが公開されたのだが、驚くのはそのデザイナーだ。1人目は、「LOVOT」等のデザインで知られる根津孝太氏。根津氏はすでに同社の「零式人機」等のデザインに関わっていたが、今回、新たに加わった2人目は、なんとマクロスシリーズ監督の河森正治氏である。
-
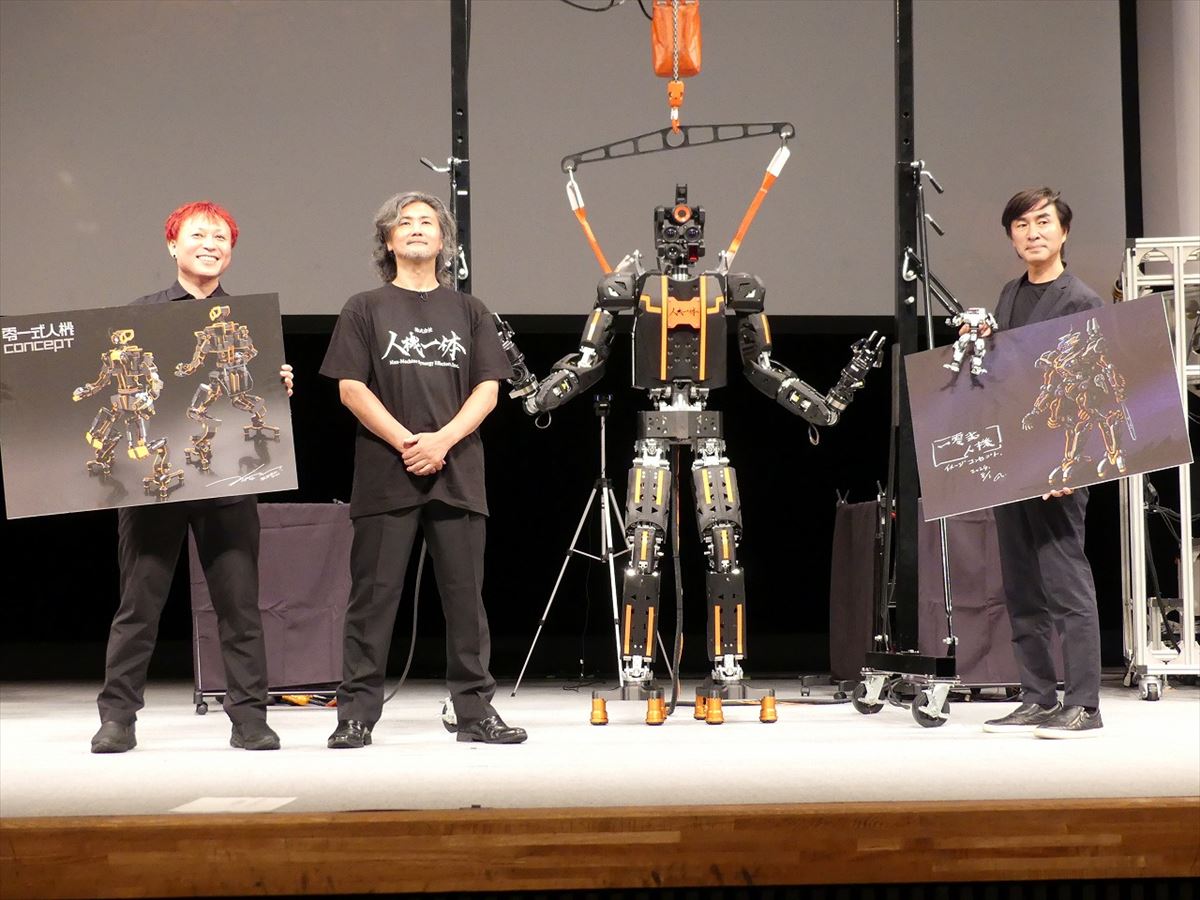
当日は、根津孝太氏(左)と河森正治氏(右)も登壇

河森氏はこれまで、様々なSF作品でロボットのデザインを担当してきたが、現実社会で動くロボットのインダストリアルデザインは、これが初挑戦だという。河森氏がデザインするのは、「一零式人機 ver.1」。機能の詳細については明らかにされなかったが、河森メカらしく、変形することを考えているとのこと。
-
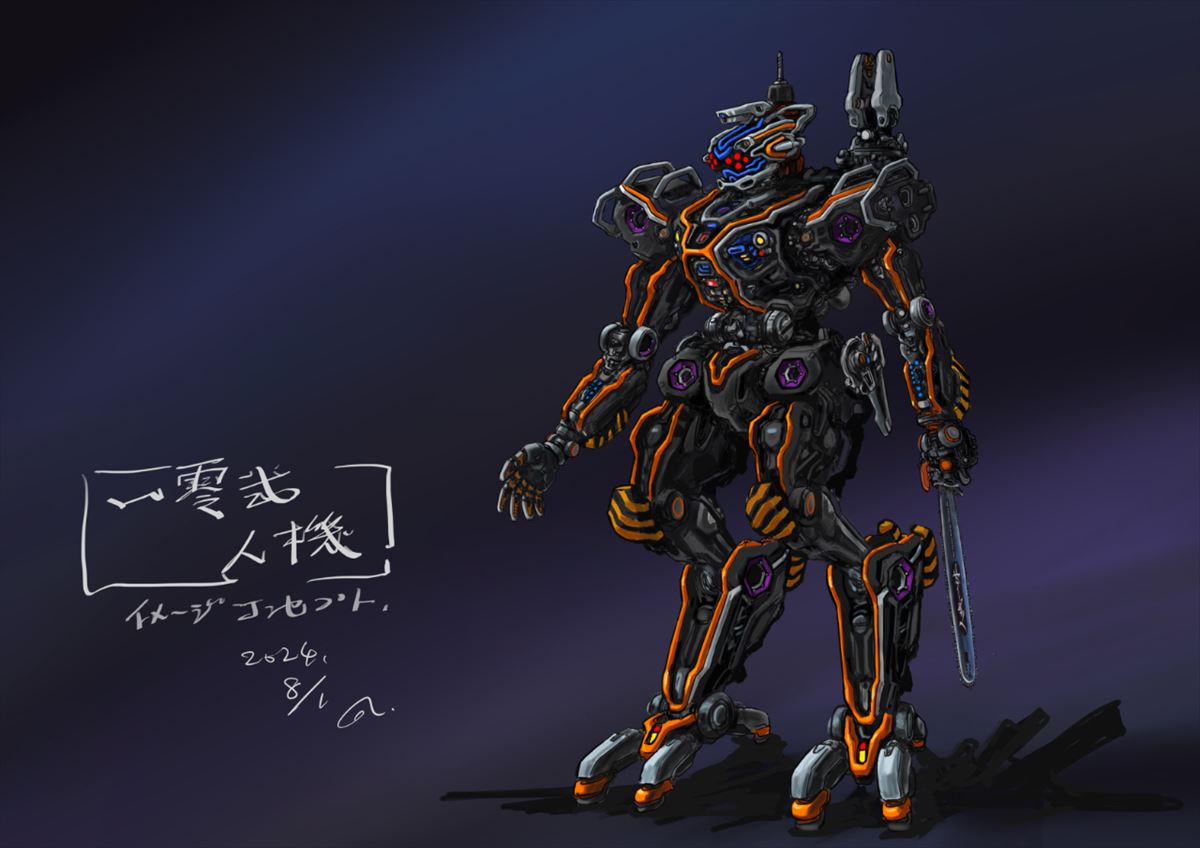
河森氏による「一零式人機 ver.1」のデザイン

河森氏は、機械工学が専攻。SF作品であっても、機械的な整合性のとれた変形・合体機構を得意としてきた。今回、初めて実在するロボットを作ることになるが、「もともとは、飛行機とか宇宙船とか自動車とか、現実社会のものを作りたかった。40年以上やってきて良かった」と、喜んだ。
一方、根津氏がデザインするのは、「零一式人機 ver.2」だ。同じ「零一式」であることから分かるように、これは零一式カレイド直系の発展型となり、重機としての大出力化を目指すという。また、両腕では足りない作業の補助用に、胸部からサブアームを展開する機構を備えるというのも面白いところだ。
-
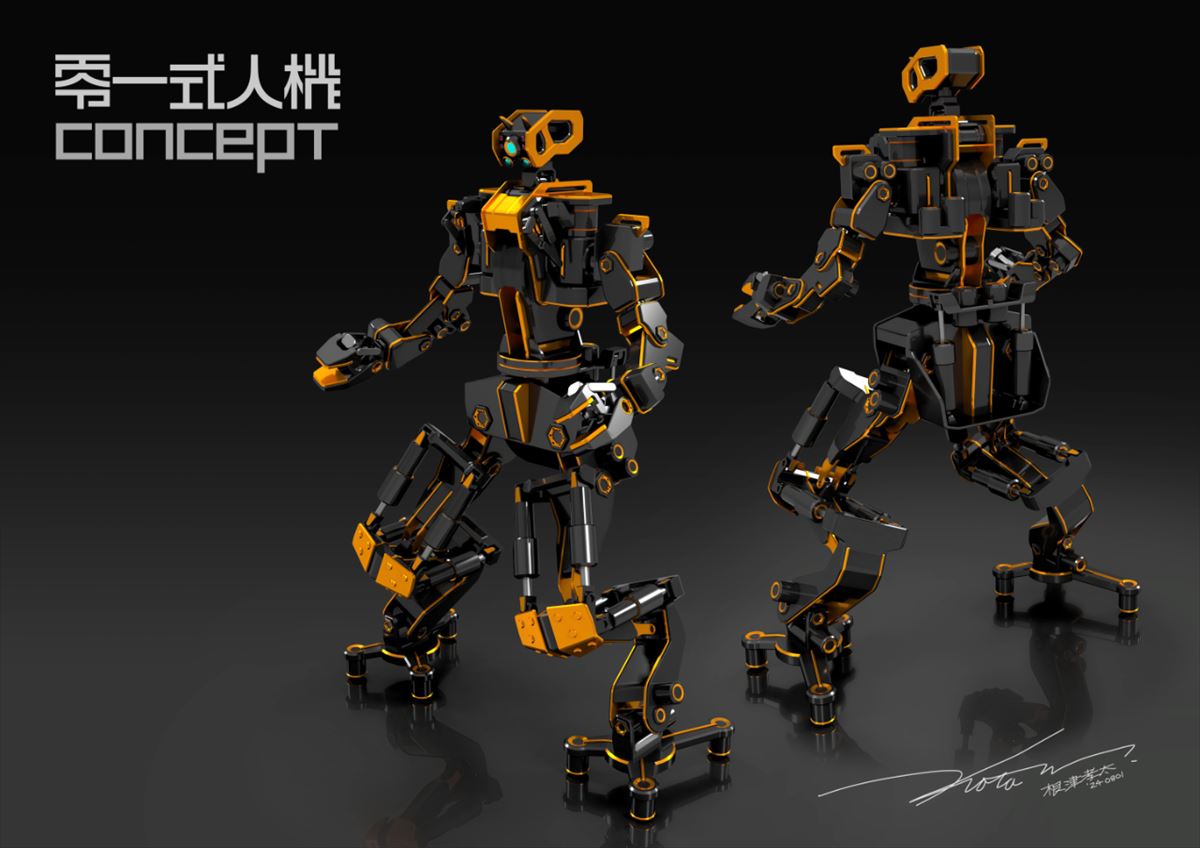
根津氏による「零一式人機 ver.2」のデザイン

金岡博士は、「これはデザインのためのデザインではない」と強調。今後、開発がより具体化していけば、修正されるところは出てくるにしても、基本的にはこのコンセプトに沿って開発を進めていく。両機とも、デザインは同社のエンジニアと協力して作られたそうで、現実的な機械設計として成立するよう考えられているようだ。
同社は、世界からフィジカルな苦役を無くすことを目指し、様々なロボットを開発している。「零式」は、高所作業用の上半身型。「零一式」は全身の人型。「零二式」は、高出力の単腕型。そのほか、未発表ではあるが、社内には「零三式」もあるそうで、これは重機としての双腕型になるとのこと。
-
「零式人機 ver.2.0」は、高所作業車のブーム先端に搭載される

それでは、今回発表された河森氏の「一零式」とは何なのか。金岡博士によれば、人型の零一式(1)と高所作業用の零式(0)の両方の特性を併せ持つことから、この2つの数字を並べて一零式(10)になったそうだ。一零式の変形・合体は、この両対応のための機能ということで、どのように動くのか、いまから非常に楽しみだ。








