リンクスは11月16日、産業分野における協働ロボットやIIoTの活用に向け、海外ベンチャー3社と総代理店契約を締結したことを発表した。
これまでも同社は産業分野でのロボット活用の一手として、2020年にAGVナビソフトを手掛けるフィンランドNavitec Systemと総代理店契約を締結し、AGV市場へと参入していたが、今回の取り組みは、そこからさらに協働ロボット市場へと足場を広げるものとなる。
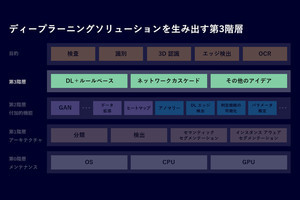
リンクス代表取締役の村上慶氏は、「協働ロボットを産業分野で活用するためには、もっと高速・高精度に動作しつつ、人などに触れたら即座に停止、そしてより小型化を実現する必要がある。今回の取り組みは、そうしたことを実現するコア技術を提供するもの」と説明する。
-

協働/協調ロボットの産業界での活用に向けた課題 (提供:リンクス)

このコア技術を提供するのが今回の契約1社目となる独Synapticon。モーションドライブ「SOMANET Circulo(ソマネットサーキュロ)」を手掛けている。このSOMANET Circuloは、ロボットの関節軸を動かすために必要な、サーボドライブ、エンコーダー×2、ブレーキ、安全機能を、ロボットの関節軸に埋め込むことが可能なコンパクトな筐体に一体化させたモーションドライブユニットで、直径72mm、出力380Wの「サーキュロ7」と、直径92mm、出力960Wの「サーキュロ9」の2製品が用意されている。また、同社が手掛けるロボット開発環境ソフトウェア「Motorcortex Robot(モーターコーテックスロボット)」も併せて提供される。こちらは、キネマティクスを含むロボットプログラム、HMI、稼働情報取得プログラムのすべてをWebブラウザ上で、ノーコードもしくはローコードで開発することができるというもので、協働ロボットに必要なダイレクトティーチングや衝突検知アプリの実装なども可能だという。
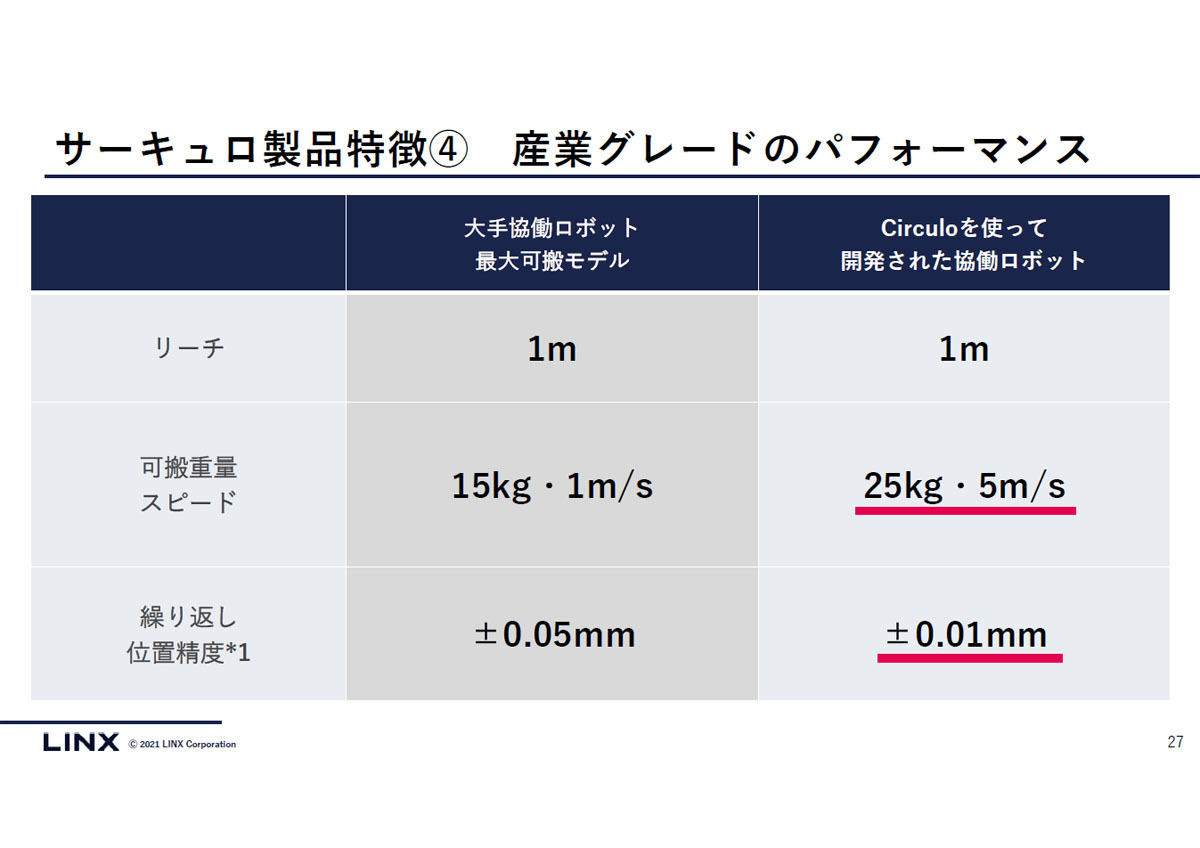
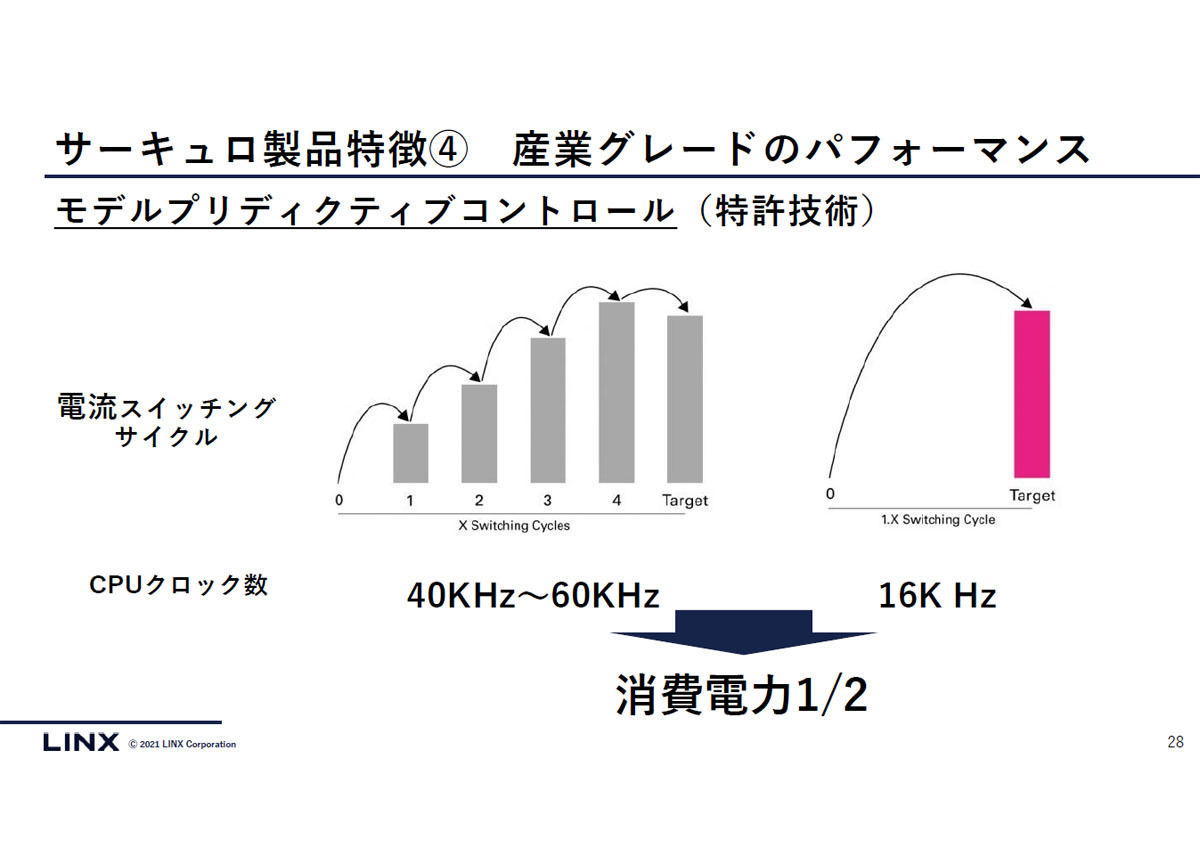
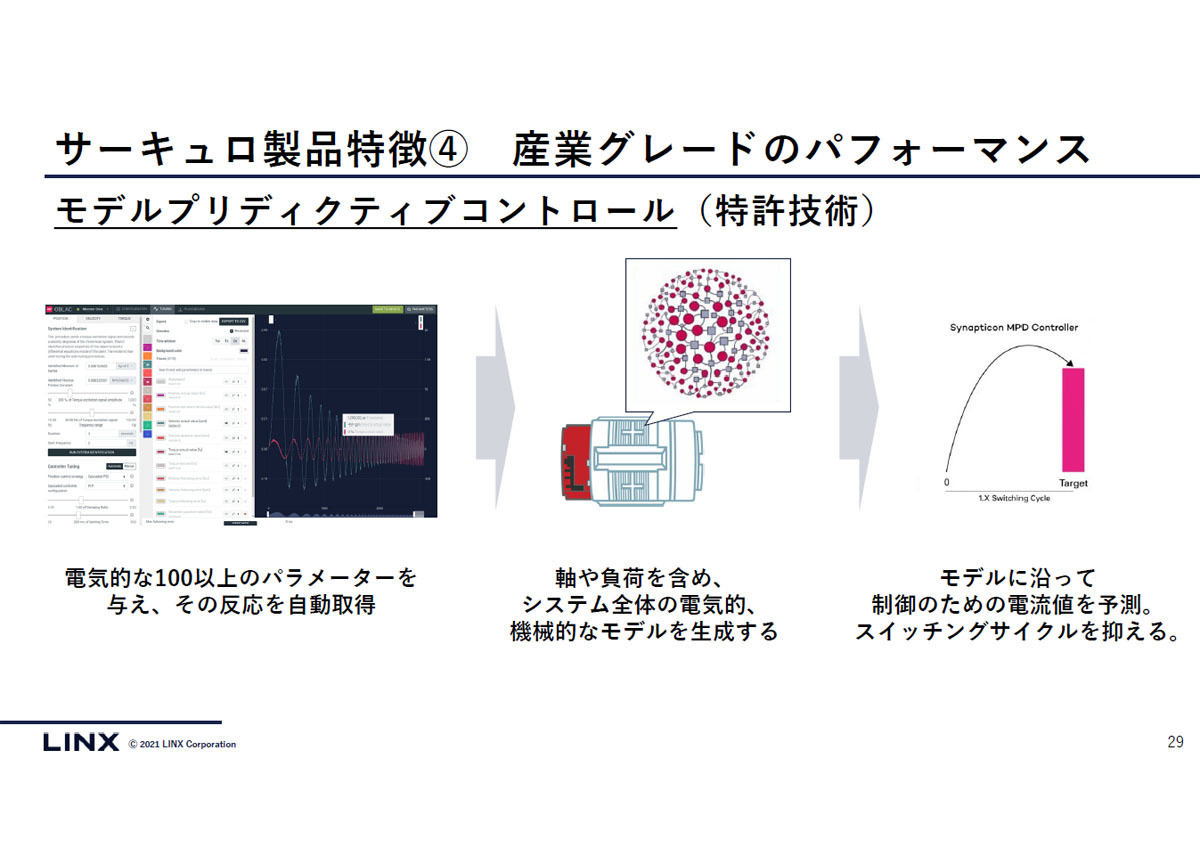

ソマネットサーキュロの特徴




契約2社目は、GPSやBluetooth、UWBなど、複数種類のセンサからの情報を標準化し、メタデータを付与して情報を整理することを可能とする位置情報解析ソフトウェアの「KINEXON RIoT(キネクソンライオット)」を手掛ける独KINEXON。リンクスでは、KINEXON RIoTを付与した工場内での自動化アプリケーションを利用した際の、モノの位置や移動データを蓄積・解析することで、工程の改善を実現したり、SCADAやMES、WMS、ERPなど、既存のシステムと連携することで、自動化アプリの拡張を図ることで、工場のスマート化やDXの推進を図っていきたいとしている。


キネクソンライオットの概要


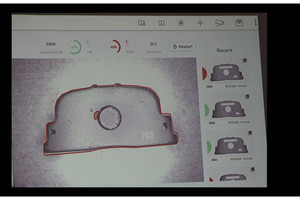
契約3社目は、ギアなどのバーコードが付与されない製造物のトレースを可能とする非接触トレーサビリティシステムの「FeaturePrint(フィーチャープリント)システム」を手掛ける米Alitheon。画像情報を元に、非接触で個体を識別することを可能とするため、製品全数に対して製造工程間を跨いでのフルトレーサビリティや、設備データと製品データの紐付けによりIIoTデータのさらなる活用を実現するという。すでに国内でも、ヤマハ発動機との間でPoCを開始、試験導入を進めているという。
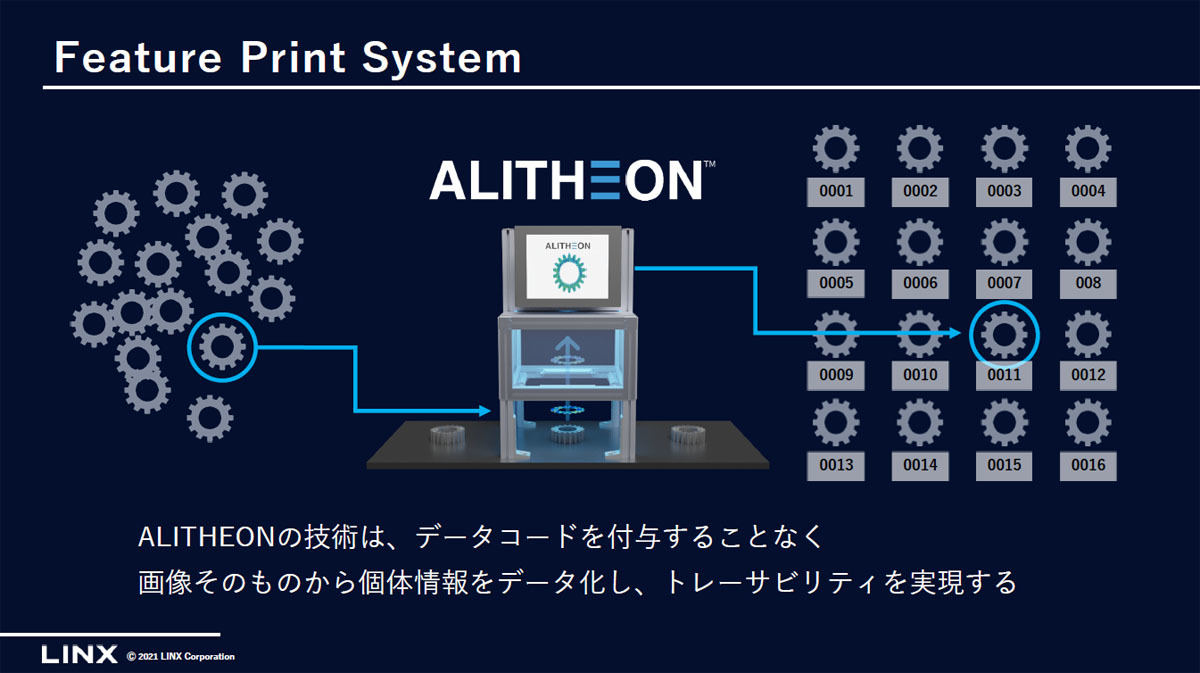
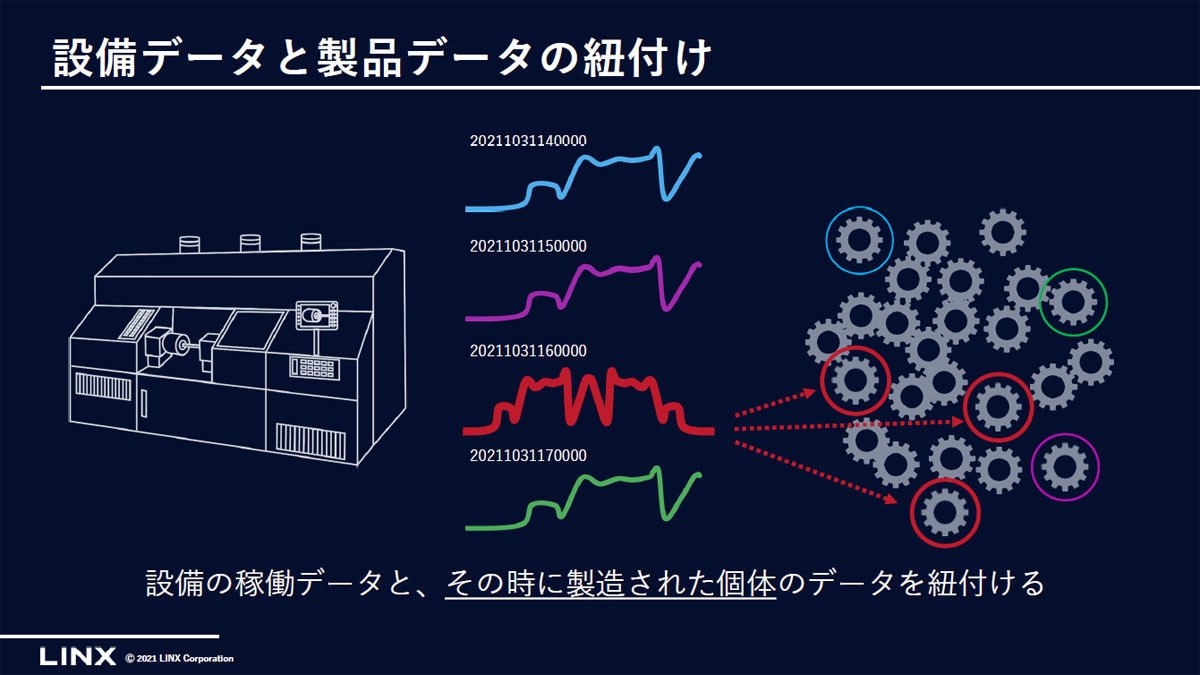
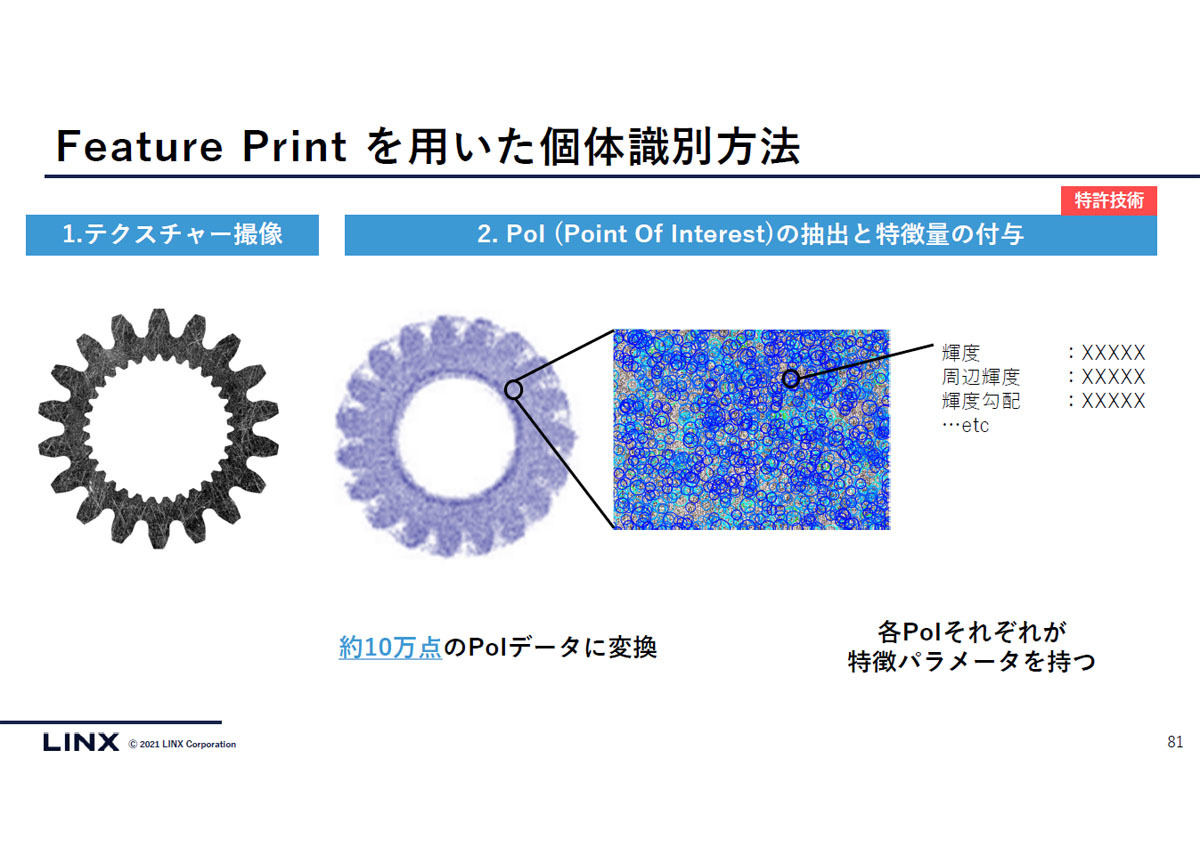
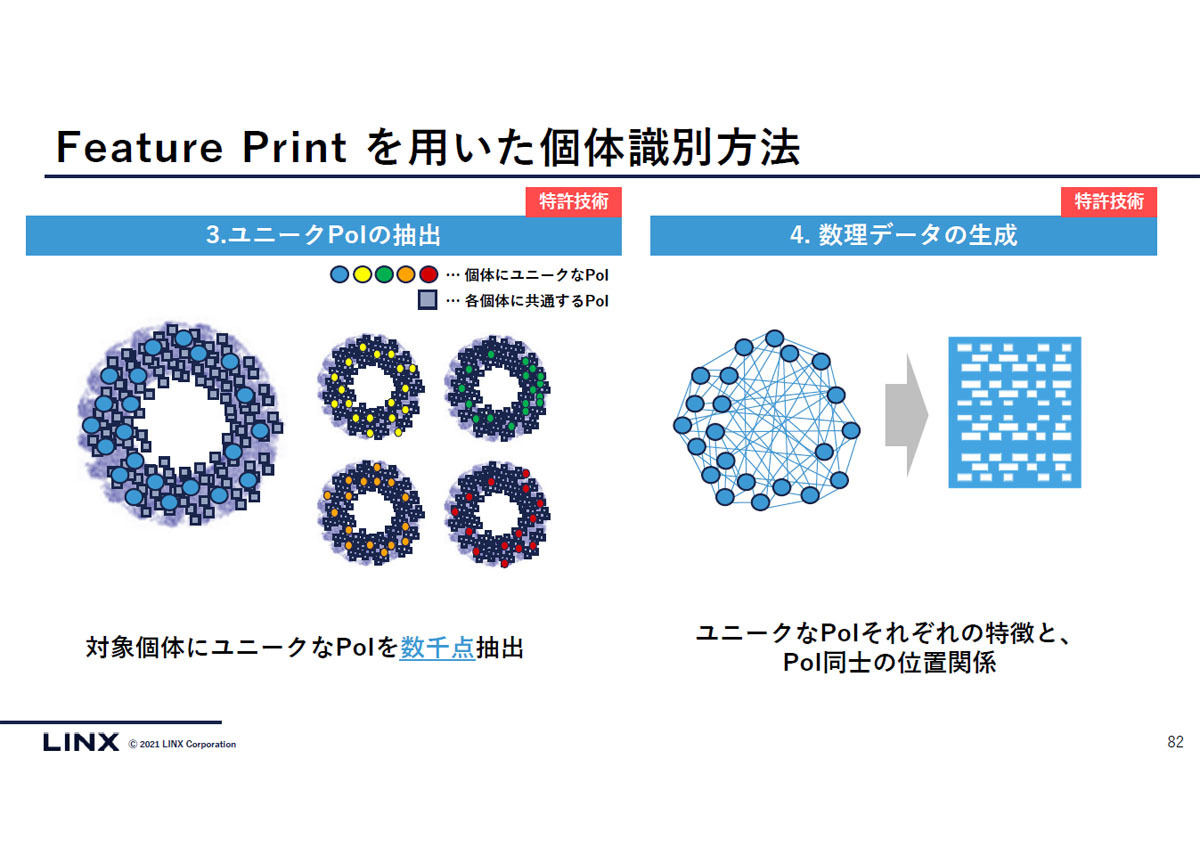
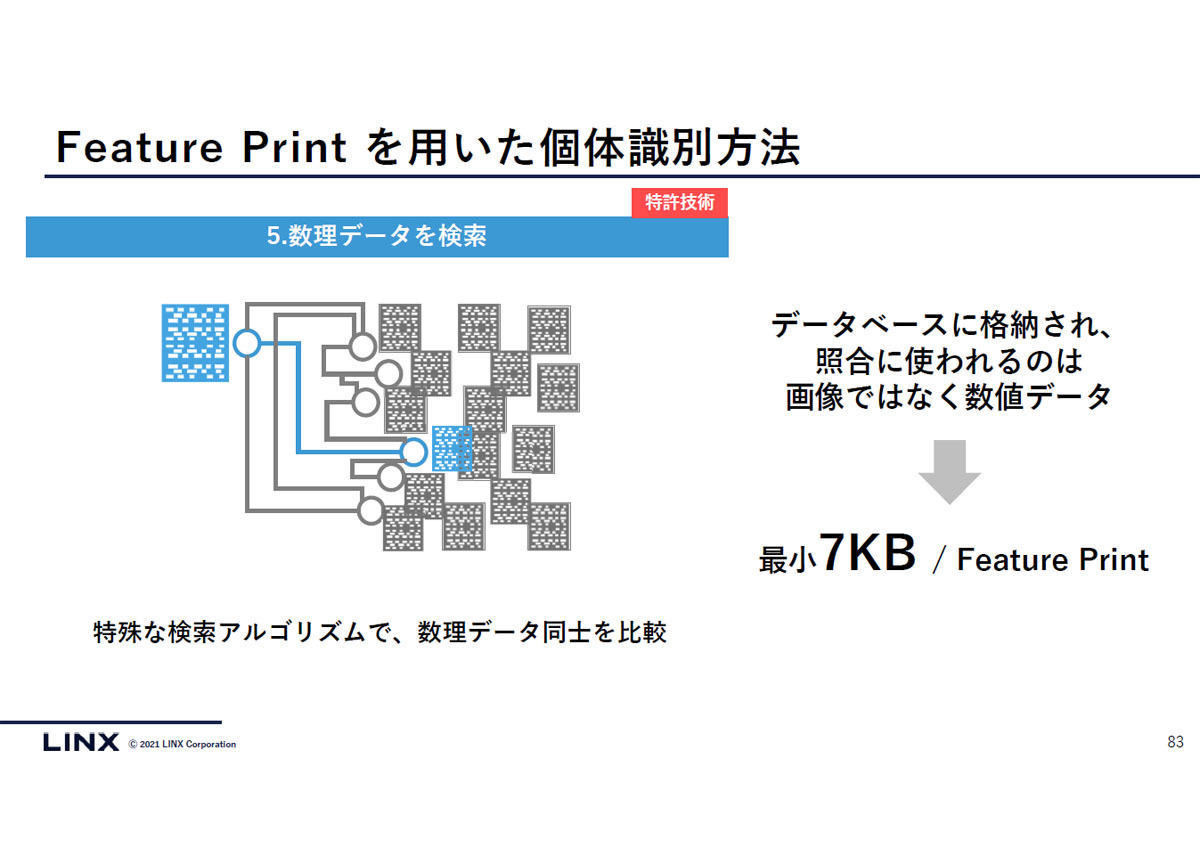

フィーチャープリントシステムの概要






なお、リンクスでは、今回の3社のソリューション販売を通じ、中長期的な目標として、2026年で5億円の売り上げを目指すとしている。