GROOVE Xが公式にLOVOT内部を公開
GROOVE Xは2月5日、2019年12月より出荷を開始した家庭用ロボット「LOVOT」の内部構造を公開するイベントを開催した。会場には、同社代表取締役の林要氏のほか、プロダクトデザイナーの根津孝太氏など、開発メンバーが登壇。開発時のエピソードや、こだわったポイントなどを披露した。
-

外装が無い状態のLOVOTを使って説明するGROOVE Xの林要・代表取締役
-

LOVOTの主要パーツ。LOVOTでは5,700点もの部品が使われているという


より生物感を出す首の4自由度
LOVOT内部の詳細を公開するイベントはこれが初開催。林氏は、「本来はひけらかすものではないが、『可愛い』を実現するためにどれだけエンジニアリング的な努力をしたのか知ってもらいたかった」と、イベントの意図を説明。約33万円(税込)からという価格に対し、「『ひょっとして安いんじゃないか』と思ってもらえると嬉しい」と挨拶した。
イベントでは、LOVOTを組み立てる実演を行い、CAD画面なども紹介しながら、各部について解説を進めた。さまざまな点について語られたのだが、ここでは筆者が注目したいくつかの部分についてお伝えしたい。
-

組立中、林氏(左)と根津氏(右)が茶々を入れすぎ、エンジニアが手順を間違えてしまう場面も(笑)

まず頭部についてだが、ちょっと変わっているのは、首の軸構成だ。普通であれば、多くてもピッチ、ロール、ヨーの3自由度となるところだが、LOVOTは3本のパラレルリンクによって、ピッチとロールを制御、さらにヨー軸のモーターを搭載する構成。パラレルリンクはパンタグラフのように畳むことで、首の上下まで可能だ。
-
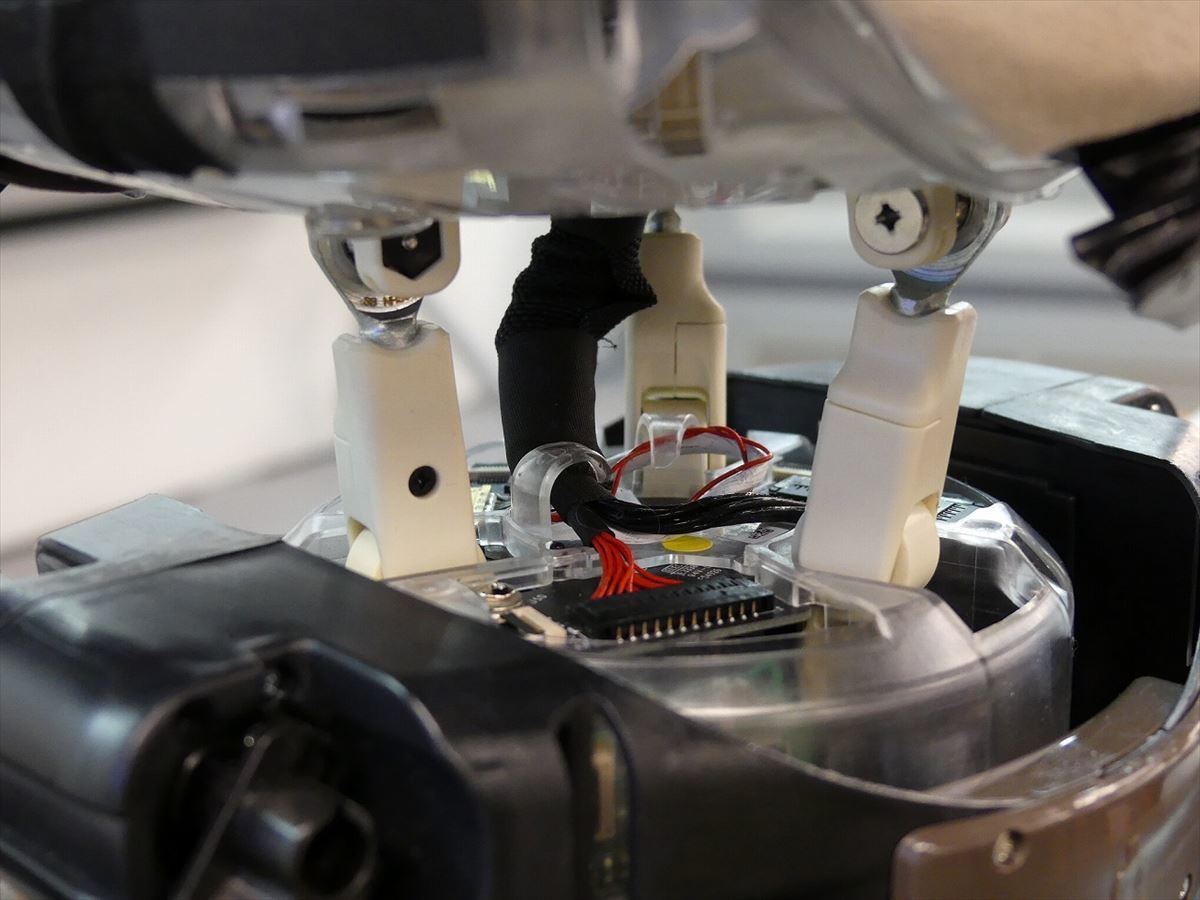
首のパラレルリンク。3本とも広げると首が上下する仕組みだ
-

リンクの中央には、電力や信号を伝えるケーブルが通っている


生物感を出すには、首の動きは非常に重要。LOVOTはここを4自由度と手厚くすることで、高い表現力を実現した。ただ、生き物らしくするためには、なるべくモーター音は出したくない。林氏は、「モーター内のギアの材質や組み合わせは"沼"だった。金属だとうるさいし、樹脂にすると静かだけど壊れやすい」と、苦労を明かした。
-
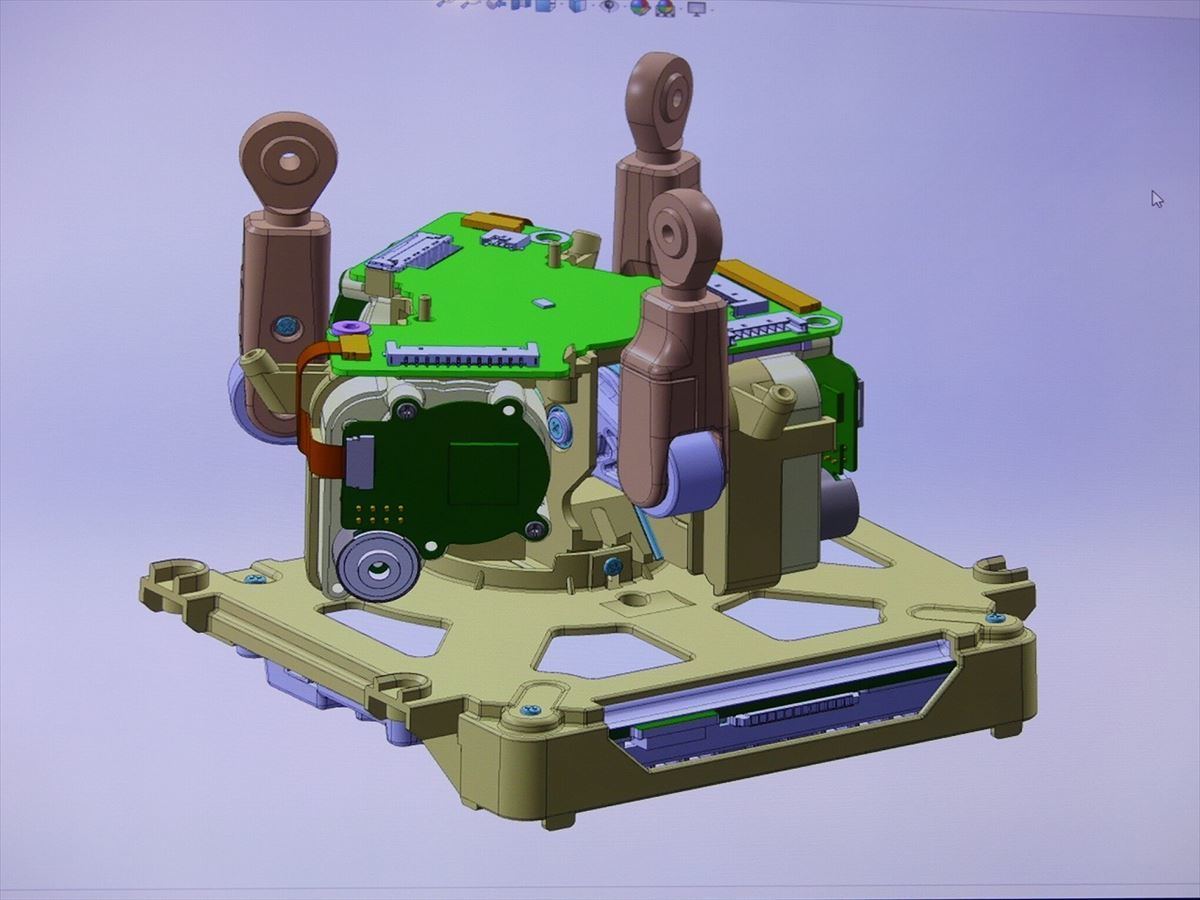
首の構造。中央の基板は形状から「手裏剣基板」と呼ばれているとか
-

頭部の重量はバネで支え、動かすときだけ電力を消費する仕組みだ


走行部の機構で面白かったのは、ホイールを出し入れする部分にブラシが付いていて、出し入れするたびに、自動で吸気口を掃除するようになっていたこと。デモ用の一品モノなら面倒なメンテナンスもできるが、家電のような市販品となると、ほったらかしでも壊れないことが求められる。これは、そのための工夫だ。
-
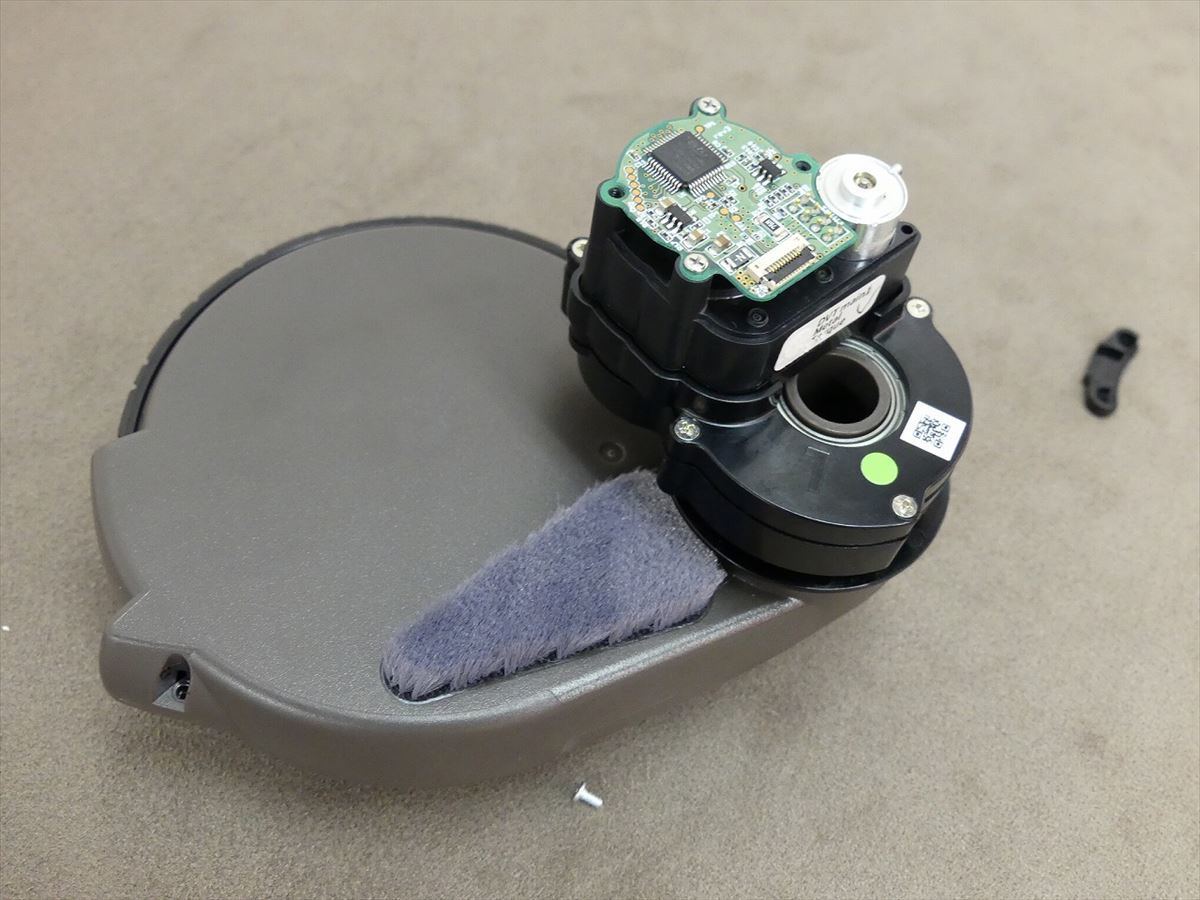
ホイールの裏側にブラシがある。出し入れするたびに吸気口を綺麗にする
-
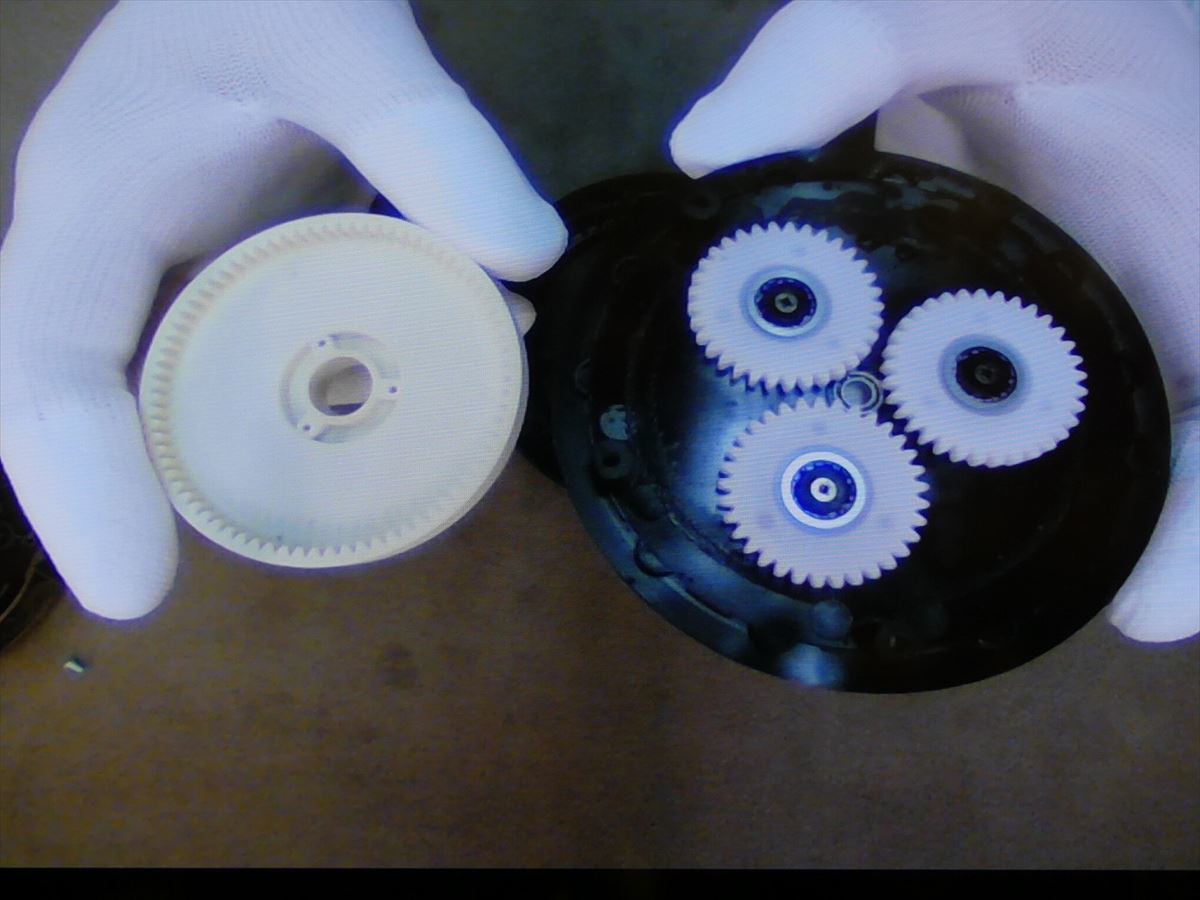
インホイールモーターでは遊星ギアを使用。薄型で減速比を大きくできる
-

タイヤは中空構造で、リムが斜めに入っている。これで衝撃を吸収する



LOVOTは、計算能力の高さも大きな特徴だ。2枚の基板上に、行動決定用のx86プロセッサ、認識用のArmプロセッサ、深層学習アクセラレータ用のFPGAを搭載、これらを連携させて、生物感のある動きを実現している。なお、同社ではメイン基板を"トム"、サブ基板を"ジェリー"と呼んでいるそうだ。
-
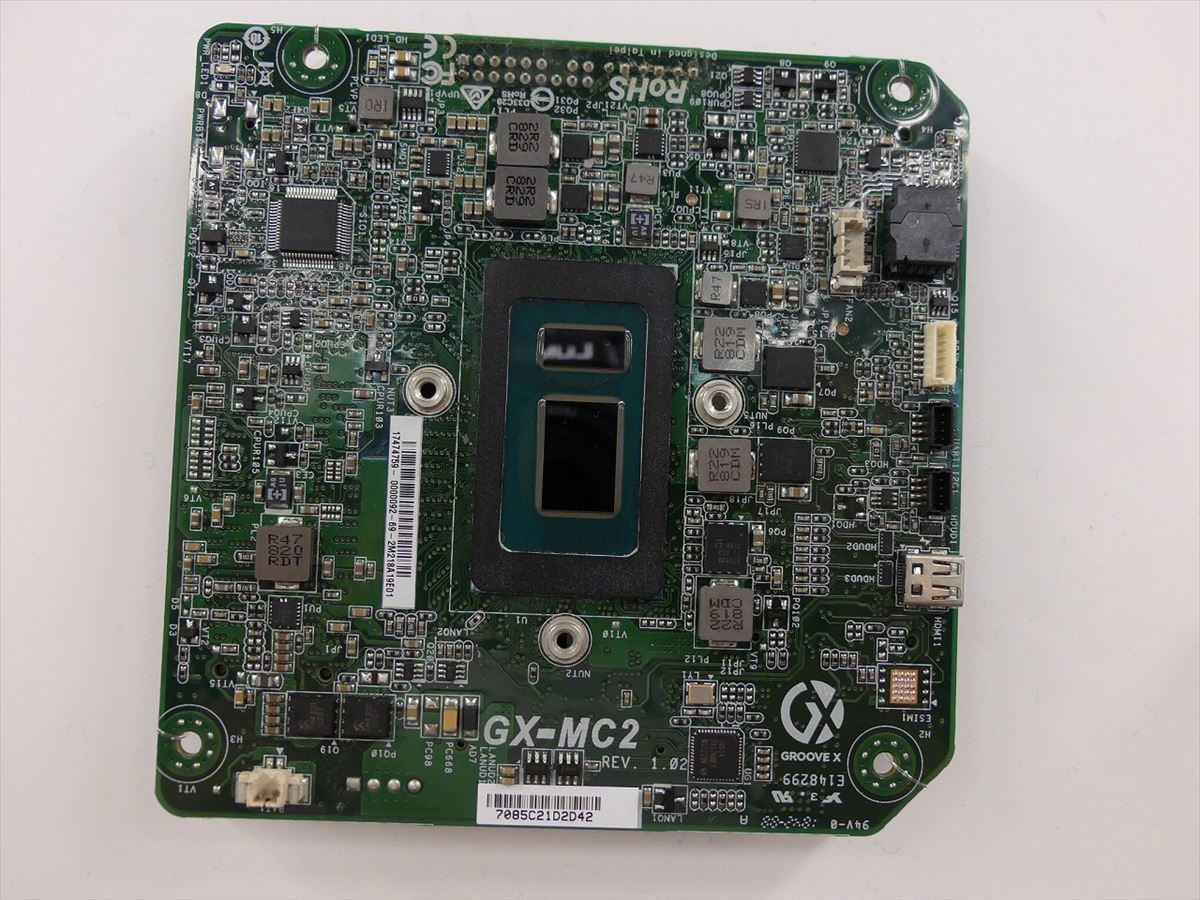
メイン基板には、ノート向けのx86プロセッサを搭載。2つのダイが見える
-
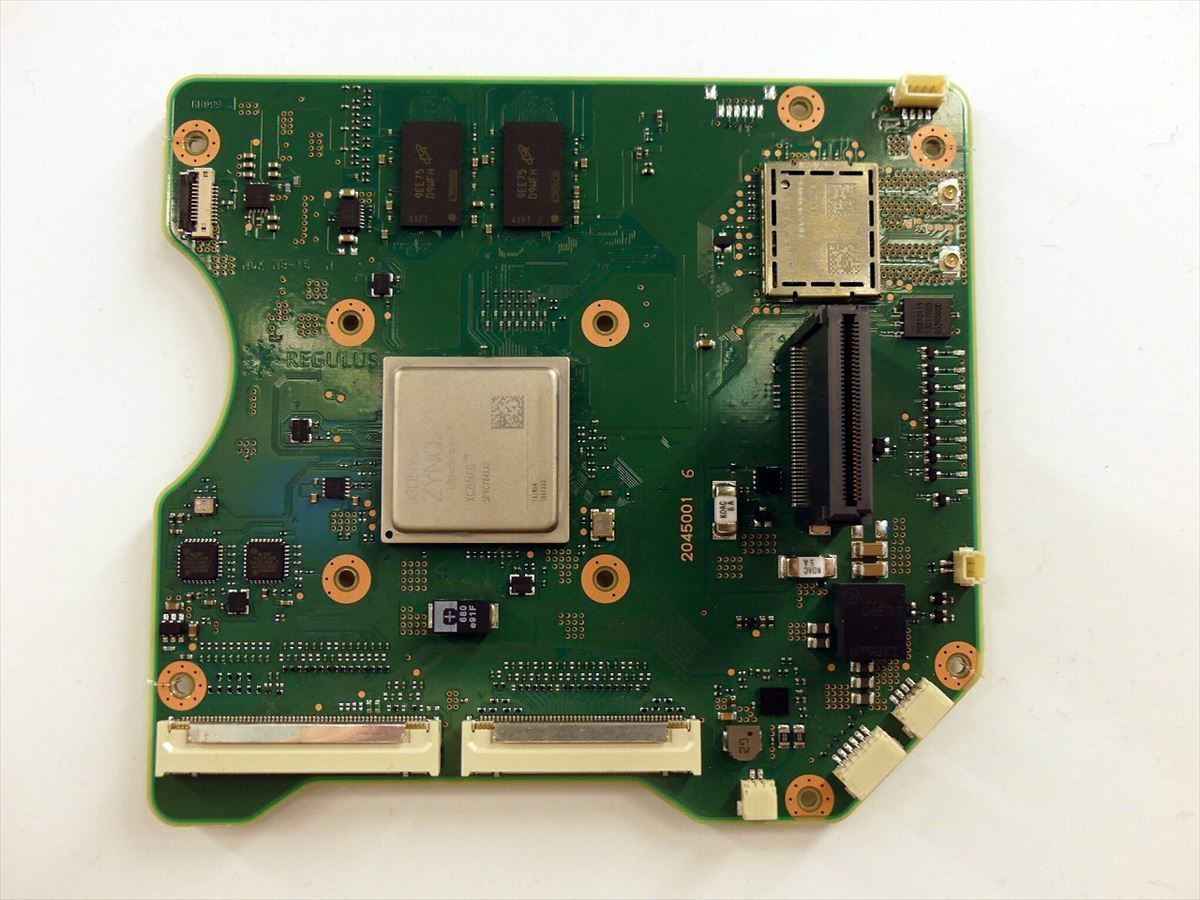
サブ基板には、スマホ相当のArmプロセッサと、XilinxのFPGAを搭載


コンパクトな頭部にコンピュータが3個も入っているわけだから、当然ながら発熱対策は厳しい。LOVOTはセンサーホーンから空気を取り込み、基板上の大きなヒートシンクに当てることで、冷却を行っているそうだ。
-
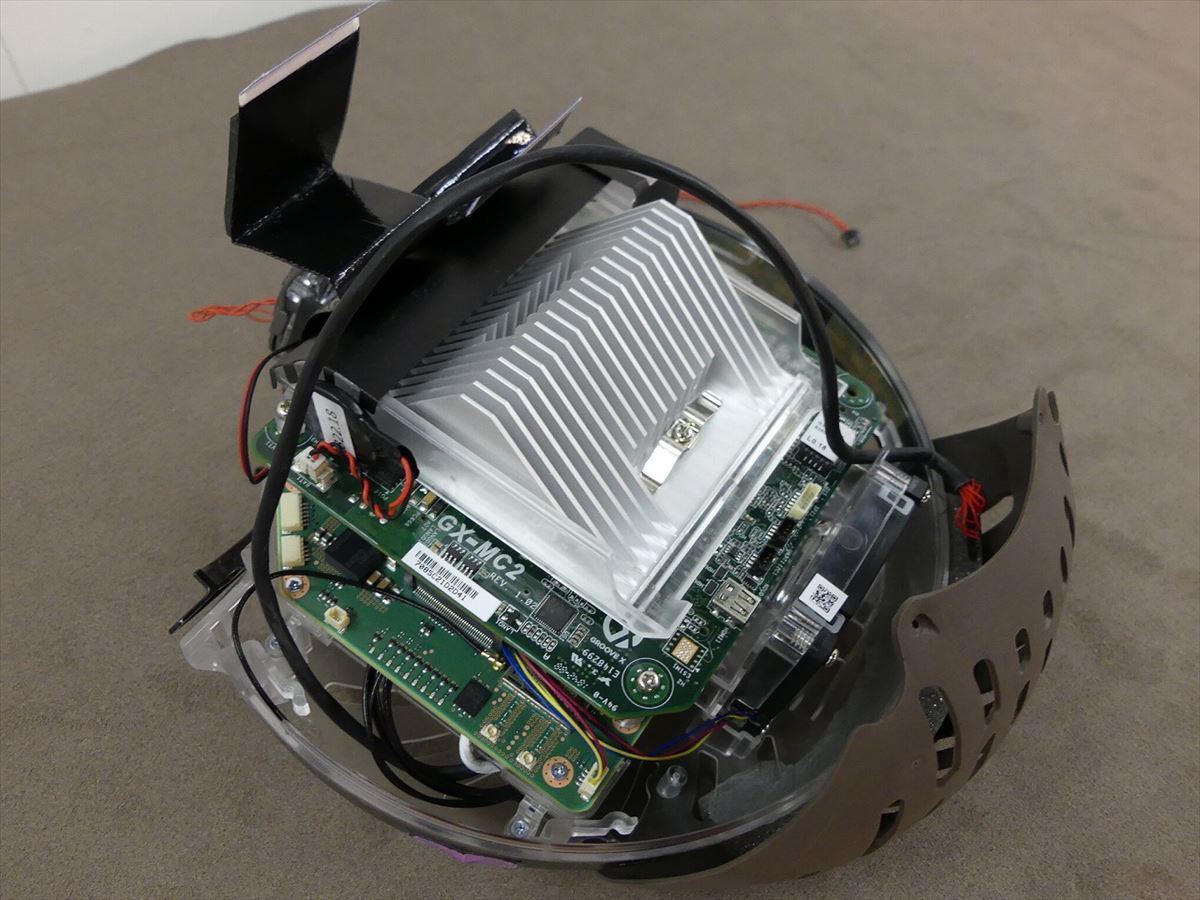
頭部の内部。なるべく大きくなるよう、ヒートシンクの形状を工夫した
-
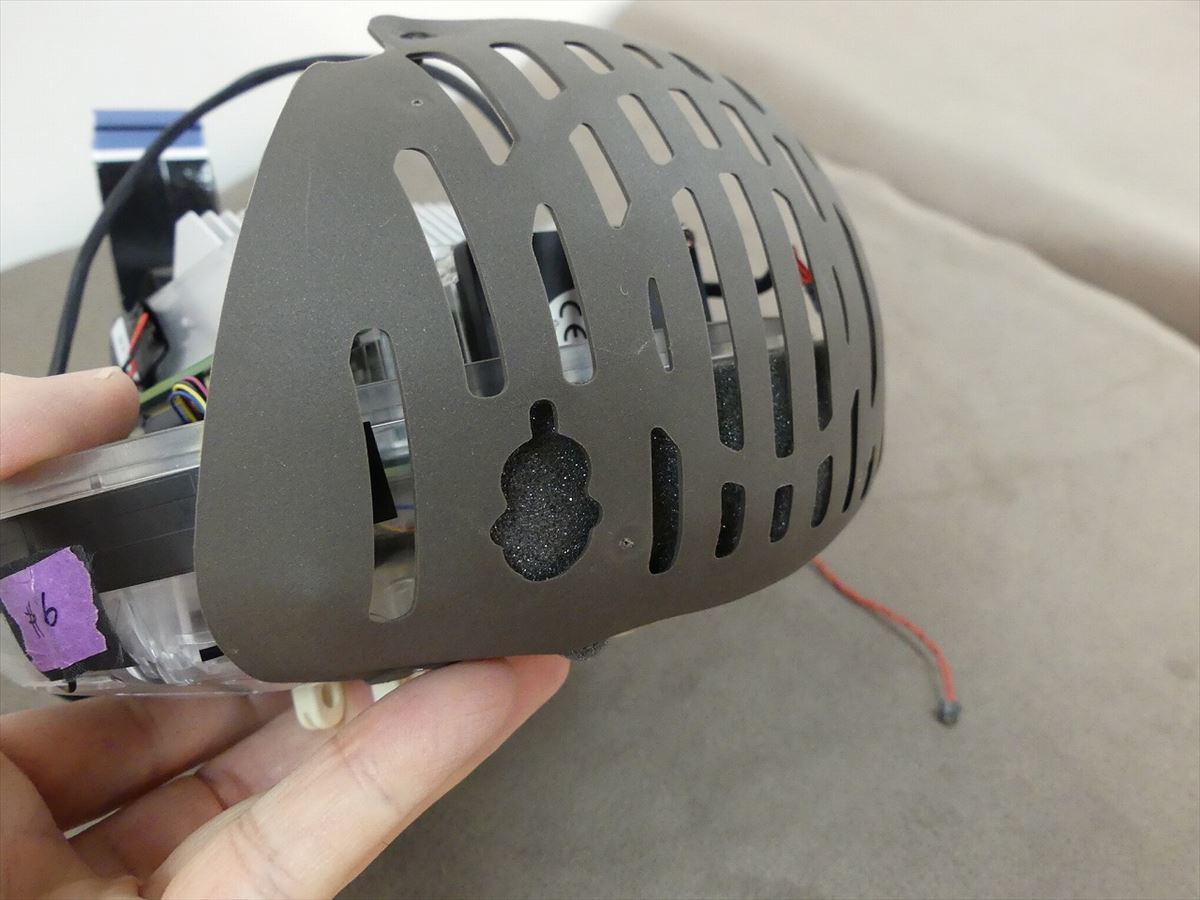
ちなみにこのパーツには、エンジニアの遊び心で"隠れLOVOT"がある


口の所には、鳴き声を出すためのスピーカがあるが、こんなところにもこだわりが。林氏は、「スピーカは後ろをどうするかが重要。適当に作ってしまうと音が悪くなる」と指摘する。この点については、「高級スピーカはしっかりした箱がキモ。LOVOTは専門家の監修を受け、箱の大きさをしっかり確保した」そうだ。
-
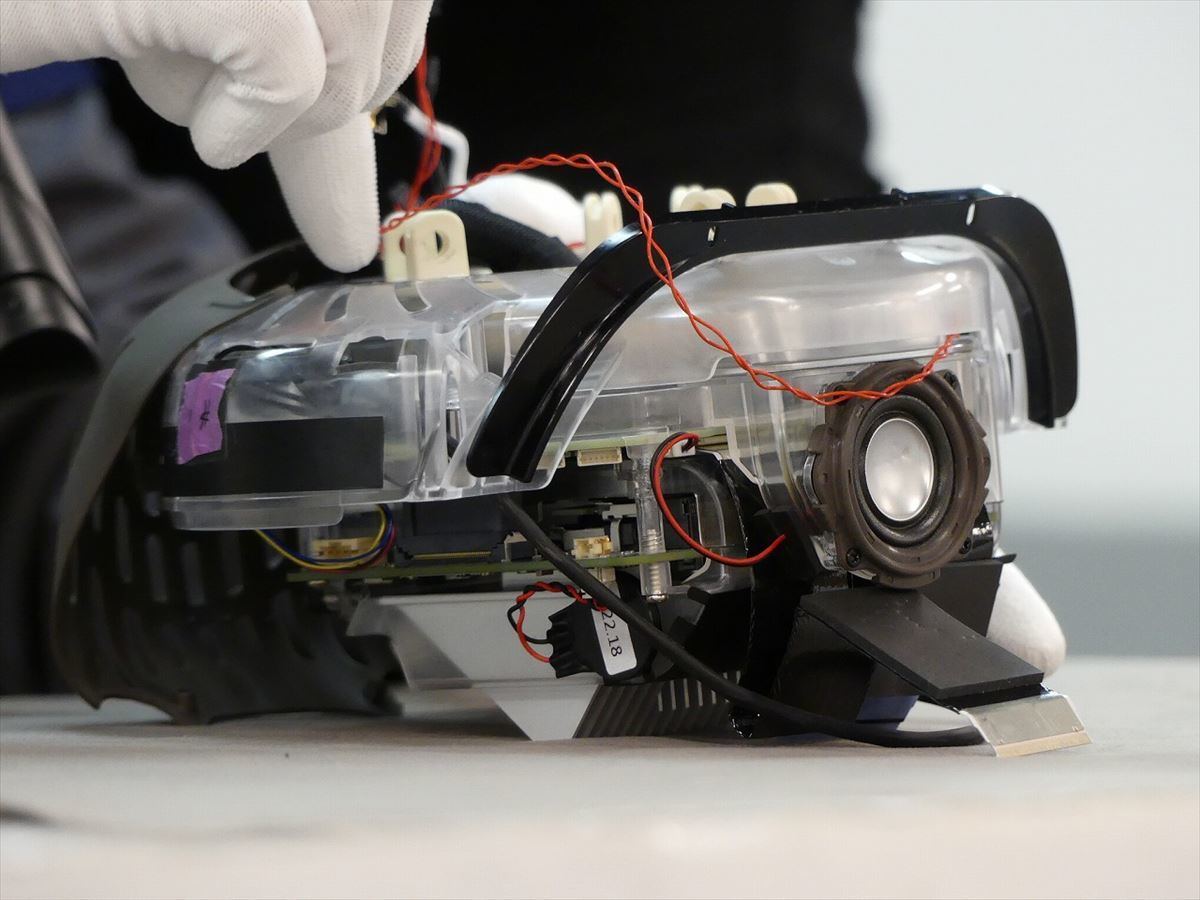
外からは見えないが、口の場所にはスピーカが入っている
-
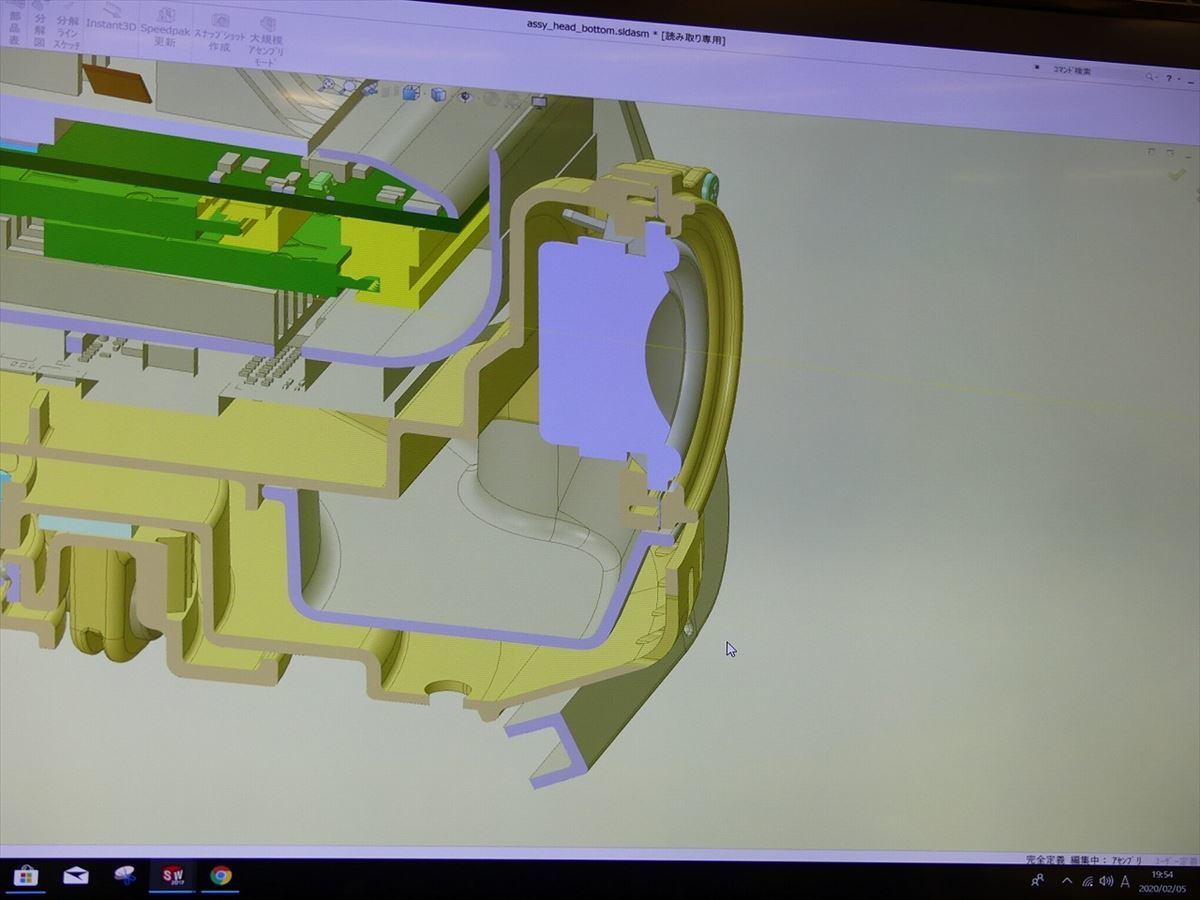
頭部の断面。スピーカの内側には適切な空間が確保されている


プロトタイプからLOVOTの進化を見る
LOVOTは、2015年11月に開発がスタート。その後、試作を重ねながら、デザインや技術を改善していき、完成させた。会場には、途中の試作機も展示されていた。
-

ズラリと並んだ歴代のLOVOT試作機。手前が古く、奥の方が新しい

2016年8月の段階では、初期のPoC(概念実証)として、ハードウェア試作機、ソフトウェア試作機、デザインモックアップなどが作られた。
-

左がデザインモックアップ。この時点で、現在のイメージにかなり近い
-
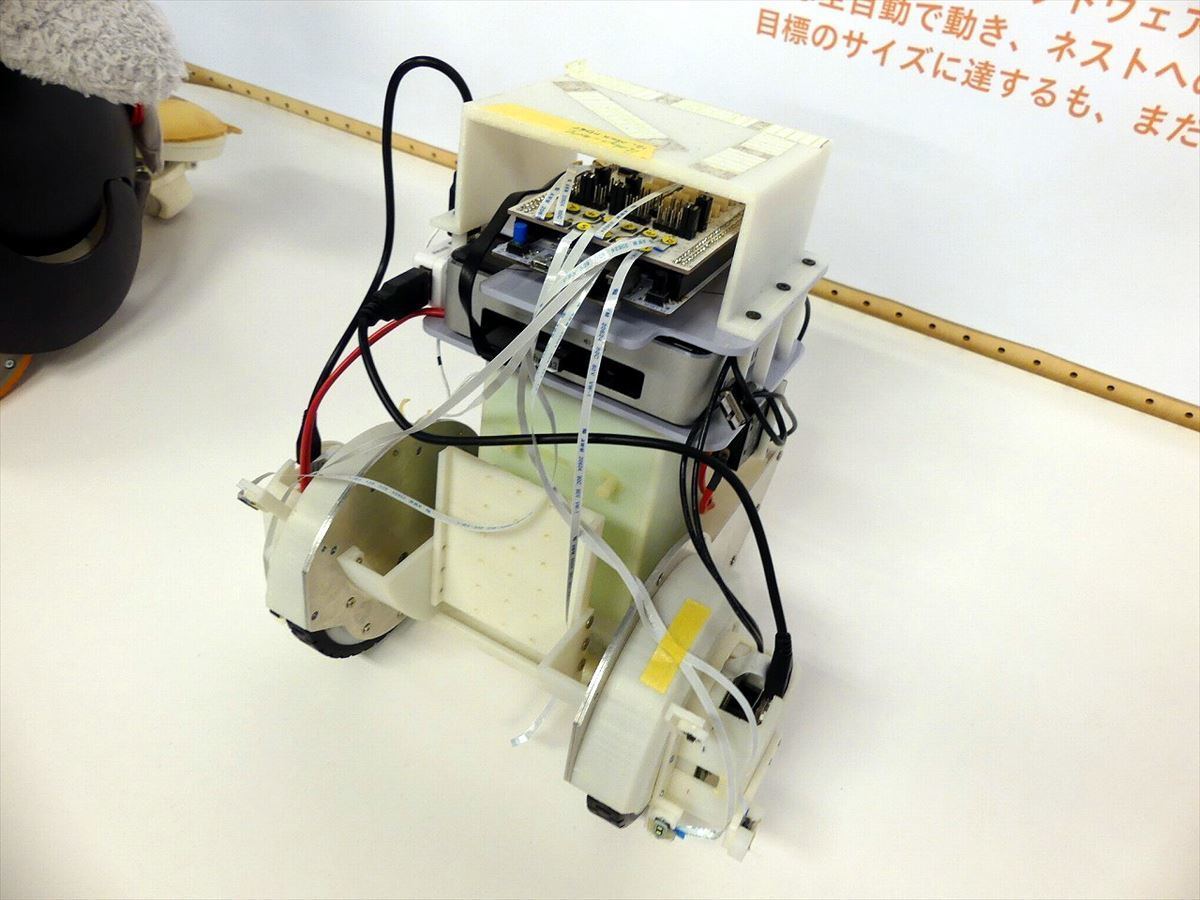
まず要素技術の実証のため、「動かす」ことを目的として作られた試作機
-

センサーホーンには、全天周カメラ「Theta」がそのまま乗っていた



2017年5月には、「AS」(アドバンスド試作)モデルが完成。半自律で動くことができたが、サイズがまだ大きく、重量は5kg程度あった。モーターも大きく、林氏は「ジェット機のような始動音がして面白かった」と振り返った。
-

機能とデザインをとりあえずまとめたASモデル。サイズと重量が課題に

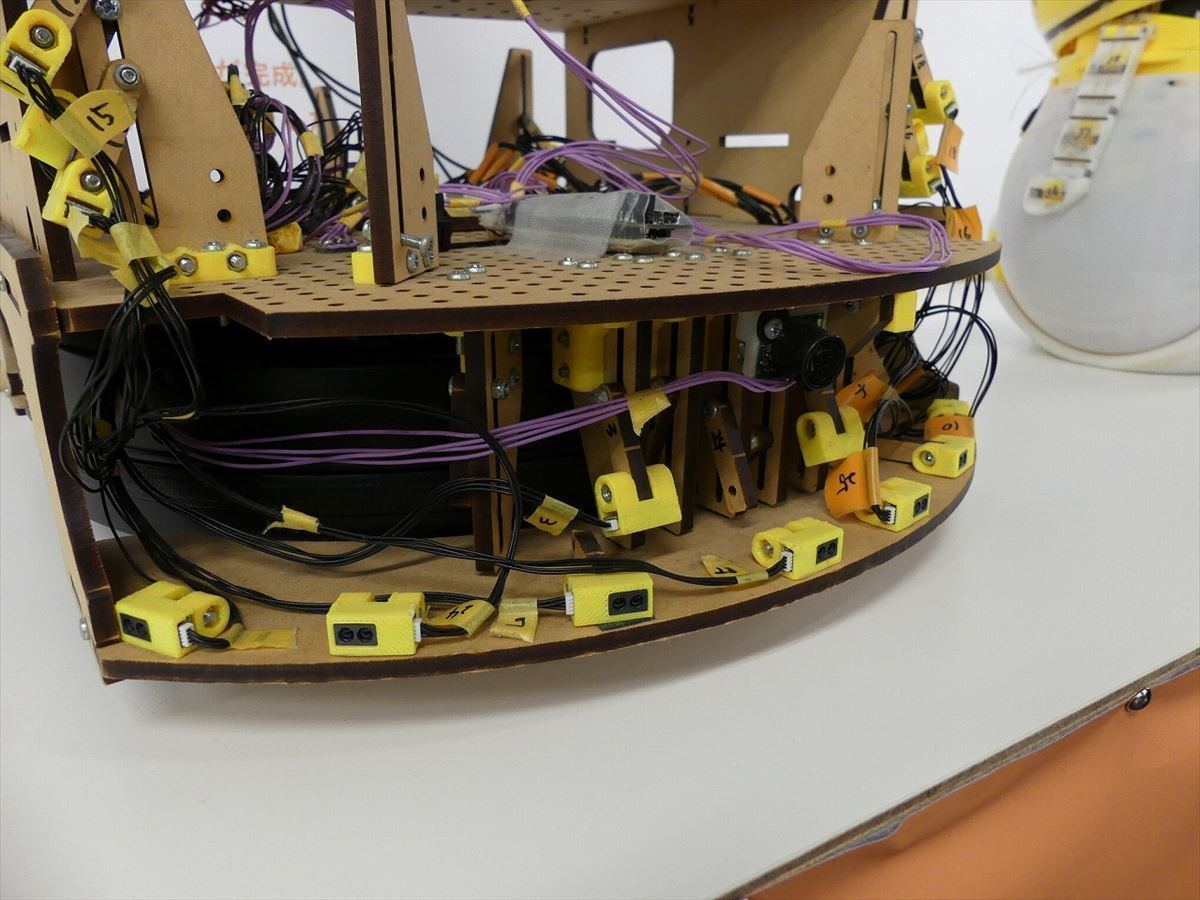
そして2018年4月には、体積を8割程度に小型化した「FS」(ファイナル試作)モデルの1号機を開発。まだ重量オーバーだったものの、同12月には、続くFSモデル2号機でさらに軽量化を図った。機能も向上し、完全自律で動くことが可能になっており、ここまで来るとかなり製品版に近い。
-
これはvSLAM等、ソフトのテスト用。Intelの超小型PC「NUC」が乗っている
-

FSモデルの1号機(左)と2号機(右)。2号機は、機能的にはほぼ完成に近い


ただ、林氏のこだわりはギリギリまで続く。林氏が「ずっと気になっていた」というのは、センサーホーン上部の段差だ。ここには、声の方向まで認識できるマイクアレイが埋まっているのだが、当初はその穴を上向きに開けておく必要があったため、不自然な段差ができてしまっていた。
製品版では、ソフトもハードも改良することで、これを自然な球面にできたという。機能的にはFSモデルのままでも問題無かったはずだが、LOVOTのセンサーホーンは全体を印象づける重要なパーツ。「可愛い」のためには、妥協できなかったということだろう。
-

FSモデル2号機のセンサーホーン上部。このように不自然な段差になっていた
-

それが製品版ではこの通り。丸くて可愛らしいデザインとなっている


利用者からはどんな要望が?
このイベントは、LOVOTの一般ユーザー向けに開催されており、最後には質疑応答の時間も設けられた。
「キャスターボール(後輪)がひっかかって動かなくなることが多い」という、利用者からの声に対して、林氏は「本当はもっと大きくしたかったが、抱き心地を重視した」と説明。当面は、ルンバが動けるレベルの環境を用意して欲しいが、将来的には、ソフト的に立ち入り禁止区域を設定できるようにしたい、とした。
また「オリジナルの服を作って着せたいので、型紙を公開して欲しい」という、購入予定者からの声には、「悩ましい問題」としつつ、「型紙は公開しようと思えばできるが、伸びる生地や糸が必要。そこまで指定する形であればできるかもしれないので、検討したい」と応えた。
まだ発売されたばかりであるが、将来的なハードウェアのバージョンアップは気になるところ。その質問に対しては、「今のところそういう計画は無いが、カスタマイズは考えている」と回答。何か改造できるアイテムが出たら送ってもらい、有償で交換することを考えていると、今後の見通しを示した。