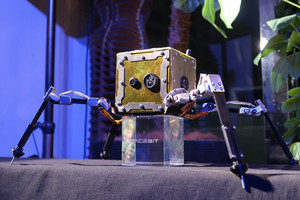
世界初の民間月面探査を目指す超小型ローバーの体験操縦イベントが、9月18日より、サンシャイン60展望台にて開催されている。このローバーは、ダイモンが開発している「YAOKI」。15(W)×15(D)×10(H)cmという手のひらサイズながら、米Astroboticのランダー「Peregrine」に搭載され、2022年に打ち上げられる予定だ。
-

サンシャイン60展望台の「YAOKI」体験操縦コーナー。開催は26日まで

このローバーについては、2年前にも記事で紹介しているのだが、だいぶ時間も経っているので、最新状況についてお伝えしたい。イベント会場にて、ダイモンの中島紳一郎社長に話を伺った。
2年前からの変更点をチェック!
YAOKIは2輪型のローバーである。特徴は、上下がほぼ対称の形状になっており、もし裏返ってしまっても、同じように走行を続けられることだ。月面において、転倒で動けなくなるような事態は絶対に避けたいところ。YAOKIの“七転八起”に由来する名前は伊達ではないといえる。
-

YAOKIはほぼ上下対称。どちらも表といえるので、裏返る心配は無用だ

ボディの前面にはカメラを搭載。この映像を見ながら、地球から遠隔操縦する仕組みだ。地球との通信はランダー経由で行い、ランダーとの間は無線LANで接続する。月面では、内蔵バッテリにより、6時間の走行が可能。ボディには太陽電池も貼る予定だが、これは補助的な役割になる模様だ。
前回の記事で、重量は0.6kgとなっていたが、現状のフライトモデル仕様では、さらに498gまで軽量化された。新旧のローバーを見比べて、一目で分かる違いはホイールと尻尾の樹脂の色だ。フライトモデルの黄色い樹脂は、パートナー企業である三菱ケミカルが提供。これで、軽量化しつつ高い強度を実現した。


新旧ローバーの比較。左が旧モデル、右がフライトモデル仕様だ


また、ボディの材質も、グレーの樹脂から、アルミへ変更された。強度が増した分、薄くなっており、結果的に樹脂よりも軽くなったそうだ。現状のローバーは、後方のカバー部分がまだ樹脂製だったが、実際に宇宙に行くものでは、ここもアルミ製になるとのこと。
よく見ると、ボディの箱のサイズも大きくなっている。これは、熱対策の結果だという。YAOKIは非常に小さく、熱容量も小さいため、本質的に熱くなりやすい。しかしボディを大きくすると、内部で電子部品の配置の自由度が上がり、熱的に最適な配置を選択できる。なおローバー全体のサイズに変更は無い。


尾部側の違い。旧モデルはトラス状だったが、ボディが長くなった


さらに細かい違いだが、ホイールのグラウザー(板状の突起)が低くなり、本数も減っていることが分かるだろうか。グラウザーは高いほど、月面のレゴリスを捕らえて滑りにくくなる。しかし、地中に深く刺さることで、モーターの負荷が増大し、回転できなくなる恐れもあり、実際の月面に最適な形状になった。
落下実験ではまさかのハプニングも
もう1つ、YAOKIの大きな特徴は、高強度であることだ。その強度は、なんと100Gの衝撃にも耐えられるほど。ドローンを使った落下テストでは、高さ10mから砂浜に落とす予定だったのに、オペレータのミスで高度100mで分離。さすがにボディは一部破損したものの、それでも走行することができたというから驚きだ。
-

この破損が、高さ100mから落とされた結果。しかし走行はできたという

今回のミッションでは、ランダーが月面に着陸したあと、YAOKIの拘束が解かれ、月面に投下されるものの、高さは1mもなく、しかも重力は6分の1なので、100Gに耐えるほどの強度はかなりオーバースペックだ。しかし、この強度は、将来のミッションを見据えたものなのだ。
YAOKIが目指すのは、将来の有人拠点として活用が期待される月面の縦孔探査。高強度のYAOKIであれば、地表から縦孔に突っ込んで行って、落下しても平気というメリットがある。通信手段は何かしら用意する必要があるものの、そのまま落とすだけで内部を探査できるので、運用はかなりシンプルになるだろう。
今回のミッションで、Peregrineは縦孔が見つかっているLacus Mortis(死の湖)に着陸する予定だが、安全上の理由から、縦孔のすぐそばに降りることはないだろう。YAOKIは通信をランダーに依存するため、着陸点からそれほど離れられないので、今回のミッションで縦孔探査ができる可能性は極めて低い。
-

ダイモンの中島紳一郎社長。YAOKIを開発しているエンジニアでもある

しかしYAOKIは、1回で終わりではなく、継続的に月面探査を実施する計画だ。超小型のローバーなので、開発コストや輸送コストが安く、高頻度な探査が行いやすい。2022年第1四半期のミッション1に続き、同年第4四半期のミッション2では2機、以降はミッション3で10機、ミッション4で100機と、機数を増やすことを目指す。
なお最初のミッション1は当初、2021年に実施する予定だったが、ランダー側の開発遅れにより、2022年第1四半期に延期されたという。2021年に打ち上げるつもりで開発したローバーはすでにあるものの、さらなる改良のため、現在、新しいフライト品を製作しているとのこと。このように何度も作れるのも、超小型ならではのメリットである。
YAOKIの今後のロードマップ
ミッション1の打ち上げについては、すでに資金調達が完了。ミッション2については現在交渉中とのことだが、ミッション1からあまり時間も無いため、ローバーはほぼ同形状になるそうだ。
ただ、新たにワイヤレス充電の機能を追加する予定だ。ワイヤレス充電はスマートフォンでも一般的になってきているが、YAOKIでも同様に、地面に充電ステーションを置いて、ランダー側から電力を供給してもらうことを検討している。これにより、稼働時間をミッション1の6時間から、14日間まで延長することを狙う。
さらにミッション3では、ローバー用のシェルターを用意。ここで充電したり、夜間の極寒に耐えたり、真昼の高熱から退避することで、活動期間を3年間まで延ばすことを目指す。年単位の活動になれば、コストパフォーマンスは大幅に向上する。月面での体験操縦なども可能になるかもしれない。
中島社長によれば、YAOKIのサイズ感としては基本的にこのまま行く予定とのことだが、大・中・小のようにラインナップを増やす可能性もあるとか。大型YAOKIなら、科学機器やマニピュレータなどのペイロードを増やせるし、ミッション1~2の実績次第では、NASAやJAXAの月面探査プロジェクトで活用されることもあるかもしれない。
-

YAOKIのロードマップ。毎年ミッションを実施し、機数も増やしていく

サンシャイン60展望台での体験操縦イベントは、9月26日まで開催される。フライトモデル仕様での体験操縦イベントは今回が初めて。以前のイベントでは、デモ用に動きを速くしていたが、今回は実際に月面で動くリアルな速度になっているという。スタッフも常駐しているので、興味がある人は行ってみてはいかがだろうか。
筆者も操縦してみた。小石をぐるっと回ってスタート地点に帰還
-

体験操縦にチャレンジすると、認定証をプレゼント。スタンプを押そう
-

ハッシュタグを付けてSNSに写真を投稿すると、月の模倣土のプレゼントも


-

会場にはこんなものも。何かと思ったのだが……
-

このように記念写真に使うとのこと(社長自ら実演)