2号機では自動ドッキングの実証も
Gatewayへの補給ミッションに活用する場合の検討例としては、以下の軌道が示された。
-

まだ検討中だが、地球からGatewayへの軌道には、このようなものがある (C)JAXA

HTV-Xを投入するのは、近地点高度300km、遠地点高度16万km程度の長楕円軌道。ただ、この軌道にHTV-Xを投入するにはロケットの能力が足らないため、打ち上げは2回に分けて行われる。まずサービスモジュールを打ち上げて軌道上で待機させ、続けて打ち上げた与圧モジュールとドッキングを行う。
その後、WSB(Weak Stability Boundary)と呼ばれる領域を通り、月へ向かう。WSBを経由する方法だと、直接向かうより時間は余計にかかるものの、推進剤の消費を抑えられるメリットがある。なおHTV-Xでメインエンジンが廃止されることは前述の通りだが、Gatewayのミッションではサービスモジュールに搭載する必要があるそうだ。
ここで、キーになる技術が自動ドッキングである。現行のHTVは、ISSの直下10mまで接近してから、ISS側のロボットアームで捕獲される方式を採用している。HTV-Xでも、ISSへの補給ミッションではこの方式を踏襲する計画だが、Gatewayでは自動ドッキングを行う必要がある。
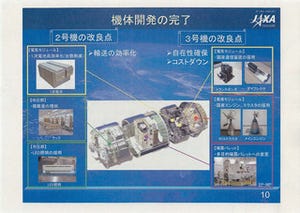
そこで、HTV-Xの2号機では、自動ドッキングの事前実証を行う計画。2号機では、曝露カーゴ搭載部にドッキング機構を搭載、補給ミッション完了後にISSから分離し、向きを変えて、ISSにドッキングを試みる。ドッキングに必要となる航法センサーやドッキング機構は、自主開発する予定だという。
-

まずは従来通りのキャプチャ方式により、ISSに結合させる (C)JAXA
-

その後、技術実証として、ISSに自動ドッキングを行う予定 (C)JAXA


-

自動ドッキングに必要なコア技術は、自在性確保のため自主開発する (C)JAXA
-

開発スケジュール。2号機は2020年度から開発に着手する見込みだ (C)JAXA


HTV-X初号機は2021年度の打ち上げを目指し、現在、詳細設計が行われているところ。伊藤プロマネは、「HTVの実績により、日本の国際的なプレゼンスは大きく向上した。それを引き継ぐのは大変な重責だが、HTV-Xが将来活躍できるよう、確実に開発を進めたい」と意気込みを述べた。
-

HTV-Xについて説明するJAXAの伊藤徳政プロジェクトマネージャ
-

展示されていたHTV-Xの模型。初号機と2号機で曝露側の形態が違う