KDDIは5月16日、福島ロボットテストフィールド(福島県 南相馬市)において、同一空域内で異なるドローン運航管理システム(UTMS:UAS Traffic Management System)で運航する複数のドローン同士が衝突を回避し安全な飛行を可能とするための運用基盤を構築する実証を2月19日~20日に実施し、成功したことを発表した。
-
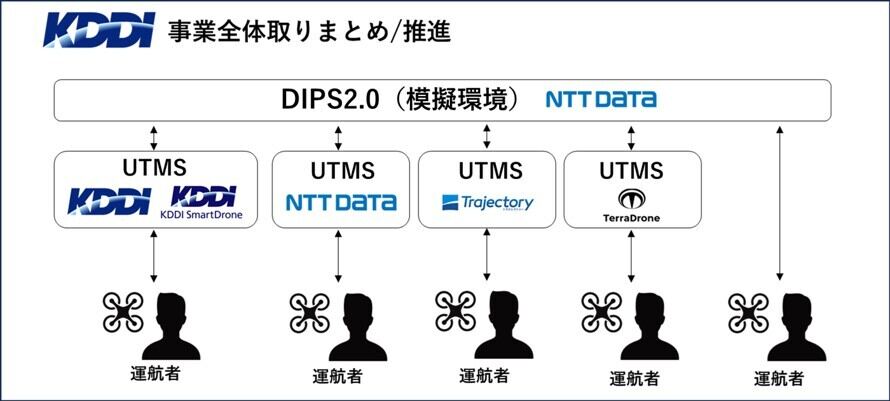
実証の概要図

実証の背景と目的
ドローンの活用は農薬散布や空撮、測量、インフラ点検をはじめ、物流や災害対応など用途が拡大し産業分野における重要なツールとして普及している。しかし一方で、従来の運航管理手法は、複数のドローンが同一空域で運航する場合や有人機との連携が求められる状況では、安全性や効率性の確保が困難とされる。
UTM事業者ごとに異なるUTMSを使ってドローンが運航管理されているため、同一空域内でドローンが安全かつ効率的な運航を実現するためには、飛行計画、フライトステータス、気象情報、空域情報などを統合的に管理するUTMSの整備が不可欠とされる。
航空局は、無人航空機間での衝突を防止し、安全で効率的な運航管理をより広く実現することを目的に、適正な機能を持つUTMサービスプロバイダの認定を開始予定。内閣府が推進する官民協議や「空の産業革命に向けたロードマップ」などの政策の下、この認定制度により各事業者が安全かつ効率的な運航を行うための新たな運用枠組みが確立される見込みだ。
今回の実証は、UTMSの運用基盤を構築しその実用性を検証することで、認定制度開始に向けた機能性および運用性の確立と、ドローン運航の安全性および効率性向上に寄与することを目的としている。


実証実験の概要
実証は、共同実施者であるNTTデータと、協力企業であるトラジェクトリー、TerraDroneの3社のUTM事業者と共に、実際の災害現場を想定したシナリオを策定。同一空域内で異なるUTMSで運航するドローンが飛行する状況下での飛行計画の調整、フライトステータスの監視、空域情報の連携などの各種機能が適切に機能するかを検証した。
なお、この実証は新エネルギー・産業技術総合開発機構(NEDO)が推進する「次世代空モビリティ実現プロジェクト(ReAMoプロジェクト)」の取り組みの一環として実施した。また、航空局が定める「UTMサービスプロバイダ認定制度」の開始に先駆けた、UTMSの機能性および運用性の検証を目的として2022年12月から取り組んでいるという。
実証では各社が開発および構築したUTMSの運用基盤を用いて、実際の運用環境下で最大5機のドローンが同じエリアで飛行するシナリオを再現し、飛行計画の調整、フライトステータスのモニタリング、気象情報や空域情報の連携機能について検証を実施した。各社のUTMS間の連携は、国土交通省航空局が運用するドローン情報基盤システム(DIPS2.0)に相当する機能を模擬的に構築して実証している。
-

飛行計画調整のイメージ

実証の成果
実証の結果、UTMS間での飛行実態を把握や国際標準フォーマットに準拠した空域情報の共有など、機能面の正確性が確認された。また、運用面においては、複数UTMS間での重複する飛行計画の相互調整やUTMSを利用しないドローン運航者とのデジタルツールよる情報共有の有効性を確認し、社会実装に向けた課題を抽出した。
KDDIらは今回得られた検証結果を踏まえ、UTM運用基盤の機能強化と、航空局による「UTMサービスプロバイダ認定制度」開始に向けた運用ルール整備の支援を進めるとともに、UTMSの社会実装に向けた機能開発および実用化検証を実施するとしている。
これにより、ドローン運航の安全性と効率性の向上を図り、ドローンが社会実装され、災害・物流・点検・監視など多くの分野で社会課題解決につながることを目指す。