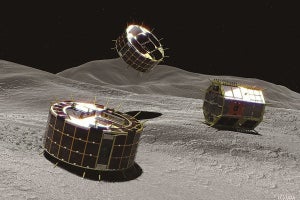
宇宙航空研究開発機構(JAXA)は10月28日、小惑星探査機「はやぶさ2」に関する記者説明会を開催し、小型ローバー「MINERVA-II2」の分離運用の結果について報告した。ローバーの分離は、10月3日に実施。小惑星リュウグウを1周した後、表面に着地した。同探査機はこれで、3台のローバーと1台のランダーのすべての着地に成功したことになる。
-

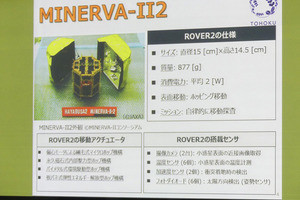
小型ローバー「MINERVA-II2」の実物大模型。直径/高さは15cm程度だ

今回の分離運用は、ローバーを周回させ、その軌道を観測することで、小惑星の重力場を高精度に推定するのが狙い。MINERVA-II2は本来、小惑星表面をホッピング移動するための4種類のアクチュエータを実証することが目的であったが、データ処理系に異常が発生。当初のミッションの遂行が難しくなっており、計画を変更していた。
JAXAの吉川真ミッションマネ.ージャは、「リュウグウは空隙率が50%以上と見られている。表面は岩石で覆われているが、内部には空洞があるかもしれない。小惑星の構造をもう少し詳しく理解したいという要望があった」と説明。「今回の重力場の測定で、内部の物質の不均一性が分かれば、小惑星の形成過程を知る上で重要なデータになる」という。
-

JAXAの吉川真ミッションマネージャ

リュウグウに誕生した2つの人工衛星
MINERVA-II2の分離に先駆け、9月17日にはリハーサルとして、2個のターゲットマーカーの分離を実施、探査機を水平移動させることで、1つは極軌道、もう1つは赤道軌道に投入した。極軌道は、小惑星に遮られることがないので観測がしやすい。一方、赤道軌道は重力推定の寄与が大きいようにと、性質の異なる軌道が選択された。
-

ターゲットマーカーは極軌道と赤道軌道に投入。ホームポジションから同時に観測する (C)JAXA

分離後のターゲットマーカーは、ホームポジションから30分間隔で撮影、リュウグウの"人工衛星"となって周回する様子が確認された。JAXAによれば、これは地球外天体の人工衛星としては世界最小。また小天体で複数の人工物を衛星軌道に投入したのも、世界で初めてとなるという(1機だけなら米国のNEAR探査機などの例がある)。
-

ONC-Tが撮影した周回中のターゲットマーカー (C)JAXA、千葉工大、産総研、立教大、東京大、高知大、名古屋大、明治大、会津大
-

ターゲットマーカーの着地点も特定された (C)JAXA、千葉工大、産総研、立教大、東京大、高知大、名古屋大、明治大、会津大


人工衛星になったということで、JAXAはターゲットマーカーへの命名を決定。極軌道に投入したTM-Cを「スプートニク」、赤道軌道に投入したTM-Eを「エクスプローラー」と名付けた。これはもちろん、旧ソ連と米国による世界初の人工衛星シリーズの名前である。リュウグウ初の人工衛星ということで、これにちなんだ。
-

命名の理由。軌道傾斜角の大きい方がスプートニク、ということで覚えやすい (C)JAXA

なお今回の分離運用では、自然な軌道運動(自由落下)による低速降下を初めて実施した。等速で降下する従来の手法に比べ、時間はかかるものの、燃料を節約できるほか、制御の頻度も大幅に下げることができる(10分ごと→1日1回)。この1年間の探査で、小惑星近傍での制御に熟練したことにより、これを実現した。
-

1日1回の制御ながら、低速降下で高精度に誘導することができた (C)JAXA

もちろん、はやぶさ2はまもなく小惑星を離脱することになるため、これからリュウグウでこの低速降下を活用する機会はほぼ無い。ただ、はやぶさ初号機の運用経験がはやぶさ2で大きく活かされているように、こうした知見も、次世代のプロジェクトで活用されることになるだろう。
MINERVA-II2の名前は「ウルラ」に
MINERVA-II2の分離も、ターゲットマーカーと同様のシーケンスで実施。ターゲットマーカーに比べ、ローバーからの反射光は弱いため、低い高度から長い露光時間(3分)で撮影を行った。ONC-W1で15枚、ONC-Tで14枚の画像に、ローバーを確認。軌道推定の結果、分離後約1日、約1.25周したのち小惑星表面に着地したものと見られる。
-

露光時間が長く、リュウグウが写ると真っ白になるため、視野をずらしている (C)JAXA
-

こちらは実際の結果。赤点のところでローバーの撮影に成功した (C)JAXA


-

ONC-Tで撮影(10分間隔)されたローバー周回の様子 (C)JAXA、千葉工大、産総研、立教大、東京大、高知大、名古屋大、明治大、会津大
ターゲットマーカーと同様に、MINERVA-II2も命名。こちらは、MINERVA-II1の「イブー」(フランス語でミミズク)と「アウル」(英語でフクロウ)を参考に、「ウルラ」(ラテン語でフクロウ)と名付けた。開発した大学コンソーシアムの吉田和哉教授(東北大学)は、「フクロウ3兄弟に加えてもらえれば」と笑顔を見せた。
-

東北大学の吉田和哉 教授(右)と九州工業大学の永岡健司 准教授(左)

分離後もローバーの不具合は好転しておらず、依然としてアクチュエータの実験は不可能な状態ではあるものの、ローバーからの通信は届いているという。通信のオン/オフのパターンが、リュウグウ表面の昼夜と一致していることから、着地していること自体は間違いないと見られる。
-

MINERVA-II2との通信状況。オン/オフの周期がリュウグウの自転と一致 (C)東北大

ただMINERVA-II2は、事前の計画では、約5日±数日、約8周±数周する予定だった。これよりかなり短かったのは、放出角度が計画では真横から下に5°の方向だったのに対し、実際は30°と、大きく異なったことが要因として考えられる。より下向きに放出された結果、軌道が変わり、早く着地したというわけだ。
-

ローバーの放出速度は計画通りだったが、放出角度に差が出た (C)JAXA、東北大、山形大、大阪大、東京電機大、東京理科大、九工大、千葉工大、産総研、立教大、東京大、高知大、名古屋大、明治大、会津大

放出角度がずれたのは、MINERVA-II2の格納時、カバーを閉じたネジのトルクを強めにしていたことが原因と推定されている。ローバーの重量が増えたため、打ち上げ時の振動で誤ってカバーが開かないよう、強めにネジを締めた結果、CFRP製のカバーの変形が大きくなり、下向きに押し出す力が大きくなった模様だ。
これはある程度、打ち上げ前に想定されていたが、下側に飛んでいく分には探査機の安全性に問題は無く、小惑星への着地にも支障は無いと判断したとのこと。ただ結果的に、小惑星の表面スレスレを通過する軌道になったため、軌道が重力の影響をより強く受けた可能性もあり、今後の解析結果を待ちたいところだ。
-

カバーはネジで閉じている。強く締めたため、歪みが溜まったと推測される (C)東北大

ところで今回のMINERVA-II2のミッション内容の変更には、はやぶさ初号機のプロジェクトマネージャーだった川口淳一郎 教授による助言もあったという。はやぶさ2の開発開始当初から、小惑星で人工物を周回させるアイデアがあり、時間的な制約の中で搭載は断念したものの、MINERVA-II2の不具合により、奇しくも実現した形だ。
-

MINERVA-II2分離運用に関し、はやぶさ2の津田雄一プロマネから寄せられたコメント (C)JAXA

ローバーを周回後に着陸させるというのは、なかなか興味深いアイデアだ。例えばはやぶさ2では、リュウグウの極側や夜側からの撮影は、リスクを考えると探査機本体で実施するのは難しい。将来の探査プロジェクトでは、ローバーを周回させて上空から撮影する、そんな使い方も実現するかもしれない。
リュウグウからの出発はいつ?
はやぶさ2はこれで、2回のタッチダウン、衝突装置(SCI)の使用、3台のローバーと1台のランダーの投下、科学観測と、リュウグウでの主要なミッションをすべて達成したことになる。MINERVA-II2の問題はあったにしても、ほぼ完璧な成果と言え、大成功だったと総括して良いだろう。
リュウグウでの最後のミッションを終えたということで、気になるのは今後、はやぶさ2がいつ地球に向け出発するのかということだが、今回、特に新しい情報は出てこなかった。従来からJAXAが公表しているのは「11月~12月」で、今のところこのスケジュールから変更は無い。現在は「準備の最終確認をしているところ」ということだ。
-

ミッションの流れ。2019年末にリュウグウを出発し、1年後に帰還予定だ (C)JAXA/池下章裕氏