宇宙航空研究開発機構(JAXA)は11月8日、小惑星探査機「はやぶさ2」に関する記者説明会を開催。その中で、探査機に搭載した小型ローバー「MINERVA-II2」について現状を明らかにした。説明によると、データ処理系に深刻な不具合が発生しており、予定していた工学ミッションの遂行が難しい状態だという。
-

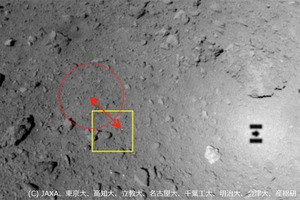
はやぶさ2に搭載した小型ローバー「MINERVA-II2」

MINERVA-II2は、直径15cm×高さ14.5cm、重量877gの小型ローバー。MINERVA初号機に似た8角柱の形状をしており、小惑星表面に投下し、ホッピングで移動する4種類の異なるメカニズムを試す予定だった。なお、9月に投下済みの「MINERVA-II1」はJAXAが開発したが、このMINERVA-II2は大学のコンソーシアムが開発している。
-
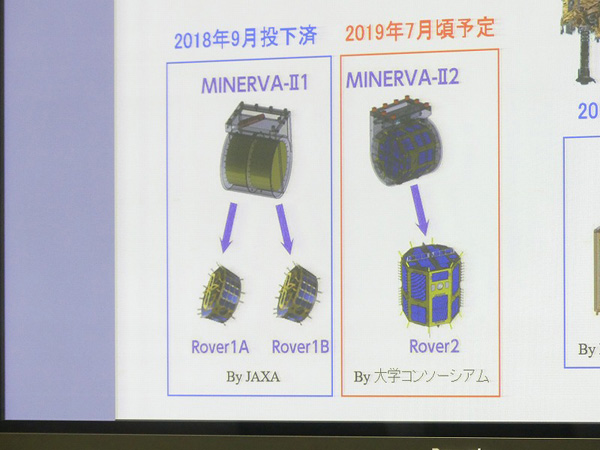
はやぶさ2には、合計3台の小型ローバーを搭載している

JAXA開発のMINERVAが回転型モーターで発生させたトルクを利用していたのに対し、MINERVA-II2の移動アクチュエータは仕組みが異なる。各大学が開発した4種類のうちの3つは、直線的に動く質量の反動を利用しているのだ。
-

搭載した4種類の移動アクチュエータ。それぞれ特徴的

山形大学の「環境依存型座屈機構」は、熱膨張率が異なる2種類の金属を組み合わせ、バネのように伸びたり縮んだりできる仕組み。昼と夜の温度変化により2つの状態が切り替わるため、動作に電力が不要なことが大きな特徴だ。
大阪大学の「板バネを用いた弾性エネルギー解放型撃力発生機構」は、板バネを凹んだ状態で搭載しておき、凸状に解放したときの反動を利用する。解放にはロック機構を利用するが、形状を戻す仕組みはないため、1回動作したら終わりだ。
東京電機大学の「永久磁石型撃力発生機構」は、金属の重りが永久磁石にくっつくときの衝突力を利用する。駆動にはDCモーターを利用しており、電力があれば何度でも動かすことは可能だ。
東北大学の「偏心モーター型マイクロホップ機構」のみ、偏った重りを回転させてトルクを発生させるが、MINERVA初号機などと違い大きくホップするのではなく、スマホがバイブで振動するように、微小なホップを連続して小惑星表面をなぞるように移動する。
また、移動の様子を確認するため、東京理科大学が開発した「MICAM」カメラを2台搭載した。そのほかローバーには、温度センサー、加速度センサー、フォトダイオードなども内蔵されている。
-

搭載カメラは東京理科大学が開発。SXGAの画像が取得可能

コンソーシアムの代表を務める東北大学の吉田和哉 教授によると、通信系は正常に動作しているものの、データ処理系の動作が不安定で、ローバーのテレメトリなども得られない状態だという。アクチュエータやセンサーはデータ処理系の先にあるため、このままでは、アクチュエータを動かすことも、カメラ画像を取得することもできない。
-

東北大学の吉田和哉教授

不具合が起きているのはデータ処理系で使われているFPGA。FPGAは論理回路を再構成可能(プログラマブル)なチップだが、吉田教授によれば、電源投入時に論理回路が正常に設定されない現象が起きているという。これまで、軌道上で何度か電源の再投入を試したものの、状況は改善されなかった。
この問題は、打ち上げ前の最終試験で初めて発生。それまでの電気試験などでは異常は見られなかったものの、最終的に構体内部に組み込んだところ、動作が不安定になったそうだ。しかし開発期間が極めて短く、打ち上げまで時間が無かったため、トラブルシューティングが間に合わず、そのまま搭載することになった模様だ。
軌道上で電源を入れ直してみても改善しなかったことから、復旧は極めて難しい見込み。ただ探査機から分離すると、電源が探査機本体の給電からローバーの太陽電池に切り替わり、電気的な状態が少し変化するため、僅かながらではあるだろうが、まだ復旧する可能性は残る。
しかし吉田教授は、「そういった一縷の望みに賭けるのではなく、作戦を変えることを考えている。正常に動作している通信系を活かして実験できないか検討している」と述べる。MINERVA-II2は今のところ、2019年7月頃に投下する予定だ。実際にどのような運用を行うかについては、改めてそのときに説明したいとした。