ロボット掃除機の設計課題 - バッテリマネジメント
技術の発展が進むにつれて、デバイス間の相互接続によるホーム・オートメーションが急速に進んでいます。ロボット掃除機の開発は、ワイヤレス接続とリモート・アクセスによる家電製品を操作する便利さへの着目から始まりました。
ロボット掃除機は、室内の床を日常的に掃除するようスケジュールを設定し、人間の負担を少なくします。便利さと時間の節約に加えて、これらのコンパクトなロボット掃除機は、従来の重くてかさばる電気掃除機と違い、家具や壁の間や、部屋の隅などの狭い隙間にも簡単に入り込めるので、掃除機をかける労力が軽減されます。

できるだけ広い範囲の床を掃除できるように、ロボット掃除機はその稼動時間を最適化する必要があります。そのため、ロボット掃除機の設計では、バッテリ充電ソリューションに入念な配慮が必要となります。市場のほとんどのロボット掃除機は、充電用ドックから約19~20Vの入力電圧を得ており、これらのシステムへの給電には再充電可能な4セルのリチウムイオン(Li-ion)バッテリを使用します。これらのバッテリの持続時間を延ばし、バッテリのコストを削減するためには、バッテリ・パックをその最大容量まで効率的に利用できる必要があります。図1に、ロボット掃除機のシステムと、そのバッテリ管理ソリューションの構成を示します。
-
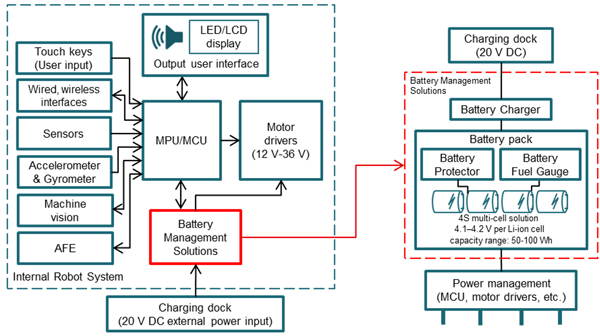
図1 ロボット掃除機のシステム電源図

バッテリの充電を高精度に制御する方法
充電回路の実装には、いくつかの方法があります。ディスクリート・ソリューションでは、単純なDC/DCコンバータを使用してバッテリを充電します。システムのマイコンは、MOSFETのオン/オフ・スイッチングを制御することで、CC-CV充電曲線を模倣しています。ディスクリート・ソリューションは安価な場合もありますが、充電電圧が不正確で、スイッチング周波数が低く、バッテリ保護機能が内蔵されないため、チャージャICと比較して余分なコストがかかったり、性能が低かったりします。
一方、チャージャICソリューションは、充電電圧が正確で、スイッチング周波数が高く、強化されたバッテリ保護機能を備えています。設計者によっては、チャージャICソリューションよりもコストの低いディスクリート・ソリューションを選択するかもしれませんが、チャージャICの利点はその価格差を補って余りあるものです。
市場に出ているロボット掃除機の稼働時間は、約60分から150分までさまざまです。掃除できる床面積の最大化はロボットの動作周期によるため、最適な稼動時間が重要なセールスポイントとなります。わずか数分長く稼動できるだけでも、掃除の仕上がりに差がでる可能性があります。
TIが提供している「bq24725A」や「bq24610」などのチャージャICは、充電電圧の精度が±0.5%であり、低コストのDC/DCコンバータの充電電圧精度が±5%であるのと比較すると高い精度を実現しています。この±0.5%という高い充電電圧精度により、バッテリ容量を最大限に高め、結果としてロボット掃除機の稼働時間を延ばすことを可能にします。
図2に、室温での4.2リチウムイオン・バッテリのバッテリ電圧と放電深度(DOD)の関係を示します。チャージャICといくつかのディスクリート・ソリューションの充電電圧精度に基づき、このデータはDOD点をバッテリ電圧にマッピングし、稼働時間に反映します。図2と、表1の関連データに示されるように、TIのチャージャICソリューションではディスクリート・ソリューションに比べて容量が大きく増加します。
-
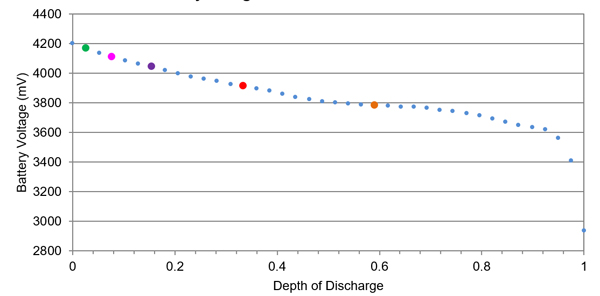
図2 リチウムイオンのDOD対バッテリ電圧

-
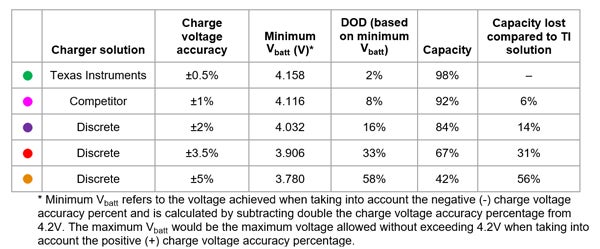
表1 充電電圧精度をバッテリ容量にマッピングした表

チャージャICを用いるメリット
最終的にバッテリ容量はデバイスの稼働時間および、特定の稼働時間によるバッテリのコスト差に反映されます。例えば、±0.5%の充電電圧精度を持つTIのチャージャICソリューションを使用したロボット掃除機は、120分間にわたって稼動できます。一方、同じロボット掃除機で、充電電圧精度が±5%のディスクリート・ソリューションであるDC/DCコンバータを使用した場合には、55分間しか稼動できません。したがって、表1に示すように、充電電圧精度の低さによる容量の減少は、ロボットの稼働時間を大幅に短くします。
金額面で考えると、このアプリケーション用のバッテリ・パックの価格は約20ドルです。この例のようにバッテリの容量が約56%小さくなると、容量的に同じとするためにはあと11ドル余計に支払わなければならなくなります。また、稼働時間が65分間長いことで、ロボット掃除機はさらに部屋を掃除できます。このような容量の最大化によるコストの節減は、チャージャICソリューションを使用する価値を定量的に示すものです。
チャージャICソリューションではスイッチング周波数が高いため、小型で低コストのインダクタを使用できます。例えば、「bq24725A」はスイッチング周波数が750kHzであり、一般にサイズが28mm2の4.7μHインダクタを使用します。一方、スイッチング周波数が50kHzと低いディスクリート・ソリューションでは、より大きな75µH以上のインダクタが必要で、約113mm2の基板スペースを占有します。ソリューション・サイズの節減だけでなく、チャージャICのインダクタは、インダクタの選択によっては、ディスクリート・ソリューションのインダクタに比べてコストがおよそ半分で済みます。
設計の観点から考えると、チャージャICには、包括的で洗練された一連のバッテリ安全性機能を備えているという利点があり、入力過電流、充電過電流、バッテリ過電圧、過熱シャットダウン、バッテリの地絡、インダクタの短絡、電界効果トランジスタ(FET)の短絡などに対する保護を提供します。一方、ディスクリート・ソリューションでは、マイコンを使用してバッテリ保護を実装する必要がありますが、その応答時間が遅いため、マイコンが障害を検出するまでの間にバッテリが損傷を受けるおそれがあります。したがって、チャージャICはどのようなワーストケースの状況でもバッテリを保護でき、設計者が独自のバッテリ保護機能を作成する必要がありません。
TIのマルチセル・スイッチング・チャージャ・ポートフォリオでは、設計の柔軟性をさらに高めるために、スタンドアロンおよびホスト制御トポロジのオプションを提供しています。「bq24610」などのスタンドアロン・チャージャICは、電圧制限と電流制限を外部の回路素子によって制御し、実装の単純化に役立ちます。「bq24725A」や「bq24773」などのホスト制御チャージャICは、I2CまたはSMBusを使用して制限をプログラミングし、システムにすでに存在するマイコンの計算能力を利用することで、BOMコストを節約します。
このように、ロボット掃除機で使用する場合、チャージャICには一般的なディスクリート充電ソリューションと比較して数多くの利点があります。ディスクリート・ソリューションは、最初は経済的かもしれませんが、チャージャICソリューションはディスクリート・ソリューションよりも稼働時間が長く、システム・コストが低く、設計の実装が単純になります。最終的には、包括的なチャージャICソリューションのさまざまな利点は、初期コストを節減するディスクリート充電ソリューションよりも上回るものとなります。
参考情報
・TIのリファレンス・デザイン「ロボット掃除機」
・バッテリ・チャージャIC「bq24725A」、「bq24610」、「bq24773」
・関連ブログ(英語)「Why you should use a dedicated fuel gauge in your battery management system」
・ホワイトペーパー(英語)「Achieving increased functionality and efficiency in vacuum robots」
著者プロフィール
Allison Walker
Texas Instruments
マーケティング・エンジニアリング アナログ・パワー バッテリ・チャージャ製品担当
本記事は、TIが自社のブログに掲載した記事を邦訳したものです。