東京大学(東大)は1月25日、接触面の静止摩擦係数を検出するマイクロ触覚センサの開発に成功したと発表した。
同成果は、同大学 IRT研究機構 下山勲 教授、同大学大学院 情報理工学系研究科 修士課程1年 岡谷泰佑 氏らの研究グループによるもので、1月24日~28日にかけて中国・上海で開催される国際学会「MEMS2016(The 29th IEEE International Conference on Micro Electro Mechanical Systems)にて発表される。
これまでに、床面との接触力や滑りを計測するためのさまざまな触覚センサが研究・発表されているが、これらのセンサでは実際に足裏が滑り出さなければ、摩擦係数を計測することは困難だった。
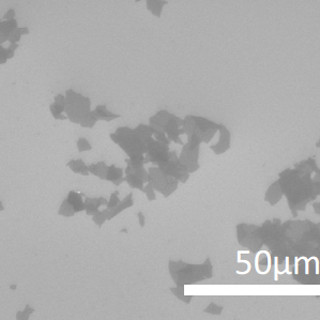
今回の研究では、高いピエゾ抵抗効果を持ち、高感度にひずみを検出することが可能なn+型シリコンをゴム材料中の複数点に配置することにより、センサを物体に押し付けただけでその表面の静止摩擦係数を検出することが可能となった。
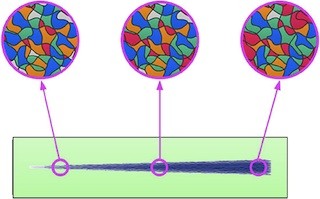
同センサを物体に押し付けると、センサ全体は滑らないにも関わらず、ゴム材料の端部分だけが滑り出し、左右方向に変形する。この左右方向への変形量は、ゴム材料を物体に押し付けた際の押しつけ力の大きさと物体表面の静止摩擦係数に依存するため、ゴム中に配置したn+型シリコン素子を用いて押し付け力と左右方向への滑り量とを検出・比較することで、物体との接触面の静止摩擦係数を計測できるという仕組みになっている。

|
部分滑りによるセンサ変形の原理図 |
同技術により、靴裏と床との滑りやすさを検出して警告する靴や路面の滑りやすさを警告するタイヤの実現、ロボットの転倒防止などにつながることが期待されると同研究グループは説明している。