早稲田大学は、加熱・冷却すると尺取り虫のように歩いたり、高速で走ったりする「ロボット結晶」を開発したと発表した。
同成果は、早稲田大学 ナノ・ライフ創新研究機構の小島秀子 研究院客員教授、同大 理工学術院の朝日透 教授、同大 大学院先進理工学研究科4年(一貫制博士課程4年)・日本学術振興会特別研究員(DC2)の谷口卓也氏、東京工業大学理学院の植草秀裕 准教授らによるもの。詳細は、オープンアクセス科学雑誌「Nature Communications」に掲載された。
-
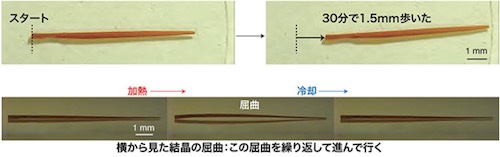
結晶の尺取り虫歩行 (出所:早稲田大学Webサイト)

2007年、ジアリールエテン結晶が光によって曲がることが報告され、「結晶は硬くて割れ易い」という固定概念を覆した。小島秀子 研究院客員教授は、アゾベンゼンやサリチリデンアニリンなど、光によって曲がるさまざまな結晶を開発してきた。このようなメカニカル結晶を実用化するに当たっては、屈曲だけでなく多様な動き方をする結晶が必要だが、光照射下で結晶が融解・固化を繰り返しながら這うように進むという報告以外に、結晶を別の場所に移動させることは実現できていなかった。
研究グループは今回、結晶が「尺取り虫のように屈曲を繰り返しながらゆっくりと歩く」、「屈曲した結晶が転がりながら高速で走る」という、異なる2つのモードによる移動を確認した。さらに、結晶が移動する推進力は、結晶外形の非対称性から発生することを明らかにした。
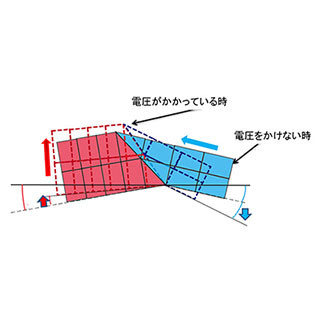
2016年に研究グループは、キラルアゾベンゼン結晶に光を当てるとねじれ曲がることを報告しており、同研究の過程で同結晶が145℃で相転移し、さらに加熱・冷却を繰り返しても結晶が壊れないことがわかった。細長い板状結晶をホットプレートに置いて加熱していくと、わずかに屈曲する様子が観察された。
結晶は熱伝導によって下から暖まるため、先に下部が相転移して結晶構造が変化し、長さが少々縮む。一方、結晶の上部は相転移温度に達しておらず、結晶の長さは元のままのために屈曲が生じる。左右で厚みが異なる板状結晶を、相転移点前後で加熱と冷却を繰り返すと、結晶は屈曲を繰り返し、尺取り虫のようにゆっくりと歩くことを見いだした。
-

結晶の高速走行 (出所:早稲田大学Webサイト)

さらに、より薄い板状結晶の場合は、加熱あるいは冷却を1回行うだけで、結晶は高速で走った。これは、結晶が曲がった時にバランスを保てずに傾いて倒れ込み、勢い余って加速度がつき何回も転がっていくためである。走る速さは秒速15mmで、歩く速さ(秒速0.0008mm)の2万倍にも達する。結晶の形と動きの関係を詳細に考察した結果、「歩く」「走る」の推進力は、結晶の外形が非対称であることから発生することがわかった。
これらの結果から、結晶という材料自体が、ロボットのように歩いたり走ったりして移動することを見出し、またその推進力の発生メカニズムも明らかにした。これにより、微小領域での物質輸送などを担うマイクロロボットとして実用化できる可能性がある。また、有機結晶は軽くてしなやかで耐久性もあるため、ソフトロボットの材料として有用であると考えられる。
ソフトロボットの実用化に関して研究グループは、結晶が移動する方向や速さを精密に制御できるようにする必要があるうえ、もう少し低い温度で相転移する新しいロボット結晶を開発することが今後の課題だと説明している。