新エネルギー・産業技術総合開発機構(NEDO)と経済産業省は、インフラ点検や災害対応向けの各種ロボットの性能を実現場への導入前に把握するための性能評価手法を「ロボット性能評価手順書」として公開した。
-

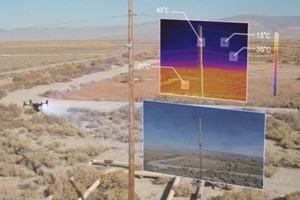
橋梁点検のための無人航空機に関する性能評価手順書に記載の試験方法の例 (左)模擬環境下での試験の様子、(右)試験方法イメージ図

老朽化した橋梁やダムなどの社会インフラを維持管理する費用は年々増加傾向にあり、人材不足も年々深刻化している。また、災害・事故時の活用に加えて、平時でも使用でき、迅速な事態収拾を可能とする特殊環境用ロボットの配備が急務となっている。一方、これらの課題解決に向けたロボットの技術開発は活発化しているものの、インフラ点検や災害対応用のロボットの性能を測る共通のモノサシが明らかになっていないため、それを規定し、性能を測る試験方法を含めた性能評価基準などの策定が喫緊の課題となっている。
NEDOは「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」において、物流やインフラ点検および災害対応分野などでの活用が期待される各種ロボット(橋梁点検用の無人航空機、ダム・河川点検用の水中点検ロボット、トンネル災害・プラント災害対応用の陸上移動ロボット)の性能を実現場に導入する前に評価するための、性能項目や性能評価のための試験方法、および試験に使用する計測システムなどをまとめた日本初の性能評価手法の開発に取り組んできた。
このたび策定された「ロボット性能評価手順書」は、これらの成果をもとにとりまとめたもので、橋梁点検用の無人航空機、ダム・河川点検用の水中点検ロボット、トンネル災害・プラント災害対応用の陸上移動ロボットを対象に、ロボット技術に携わる有識者との議論や模擬環境下での実機を用いた検証結果も踏まえ、求められる性能項目や性能を評価するための試験方法、試験に必要な測定機器などが含まれる。
実現場でロボットを実証する前に、この手順書に従って点検作業等に求められるロボットの性能を模擬環境で評価することで、開発者がロボットの性能を容易に確認できるため、開発を効率的に進めることができる。また、点検業者は、その評価データにより、客観的なロボットの性能比較が行える。
-

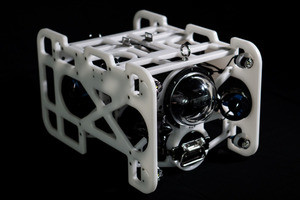
ダム・河川点検のための水中点検ロボットに関する性能評価手順書に記載の試験方法の例 (左)ダム点検ロボットの試験方法、(右)河川点検ロボットの試験方法

今後NEDOは、経済産業省とともにこの手順書の普及に努め、インフラ点検や災害対応でのロボット活用の加速させるとともに、社会インフラの維持管理・更新のためのロボット関連市場の創出にも寄与するとしている。また、2017年11月にNEDOと福島県が締結した「福島ロボットテストフィールドを活用したロボット・ドローンの実証等に関する協力協定」の取り組みの一環として、同手順書に基づく試験が「福島ロボットテストフィールド」で実施できるよう、これまでに研究開発で得られた知見を福島県へ提供しており、福島ロボットテストフィールドの設計に一部反映される予定だということだ。
なお、経済産業省の「性能評価手順書」公表サイトでは、(1)橋梁点検のための無人航空機に関する性能評価手順書、(2)ダム・河川点検のための水中点検ロボットに関する性能評価手順書、(3)トンネル災害・プラント災害のための陸上移動ロボットに関する性能評価手順書が公開されており、それぞれPDF形式でダウンロードできる。
-

トンネル災害・プラント災害のための陸上移動ロボットに関する性能評価手順書に記載の試験方法の例 (左)NISTが規格検討中の斜め登板、(右)新たに考案された試験方法(ジャングルジム)