TISインテックグループのTISは1月25日、サービスロボットとIoTやAI技術を組み合わせ、サービスロボットが人の業務を代行・分担する環境や仕組みを構築するための企画・検証から、導入・運用までを支援する「DX on RoboticBase」の提供を開始すると発表した。日本企業のロボティクス関連ビジネスを支援することで、DX(デジタルトランスフォーメーション)への貢献を目指すという。
-
「DX on RoboticBase」のサービス概要

「DX on RoboticBase」は顧客企業の要望に沿ったロボット導入に加えて、AIやIoT(Internet of Things:モノのインターネット)機器、ドローンなどを含むさまざまなデバイスとの連携や、日々の業務への落とし込みを包括的に支援するサービス。
サービスの提供に合わせて同社が開催した記者会見の中で、執行役員の田島泰氏は「今後労働人口が不足すると言われる中で、人材不足や人件費の高騰を補いながら成長カーブを描くには、有益なソフトウェアの開発だけでは間に合わず、ロボットなどを活用する必要がある」と説明した。
さらに「しかし、DXは単にロボットやデジタルツールを導入するだけで済むものではない。既存の作業を代替するロボットの提案にとどまるのではなく、新しい業務プロセスの創出やサービスの再構築まで見据えて伴走していく」と続けた。
-

TIS 執行役員 ビジネスイノベーションユニット ジェネラルマネージャー 田島泰氏

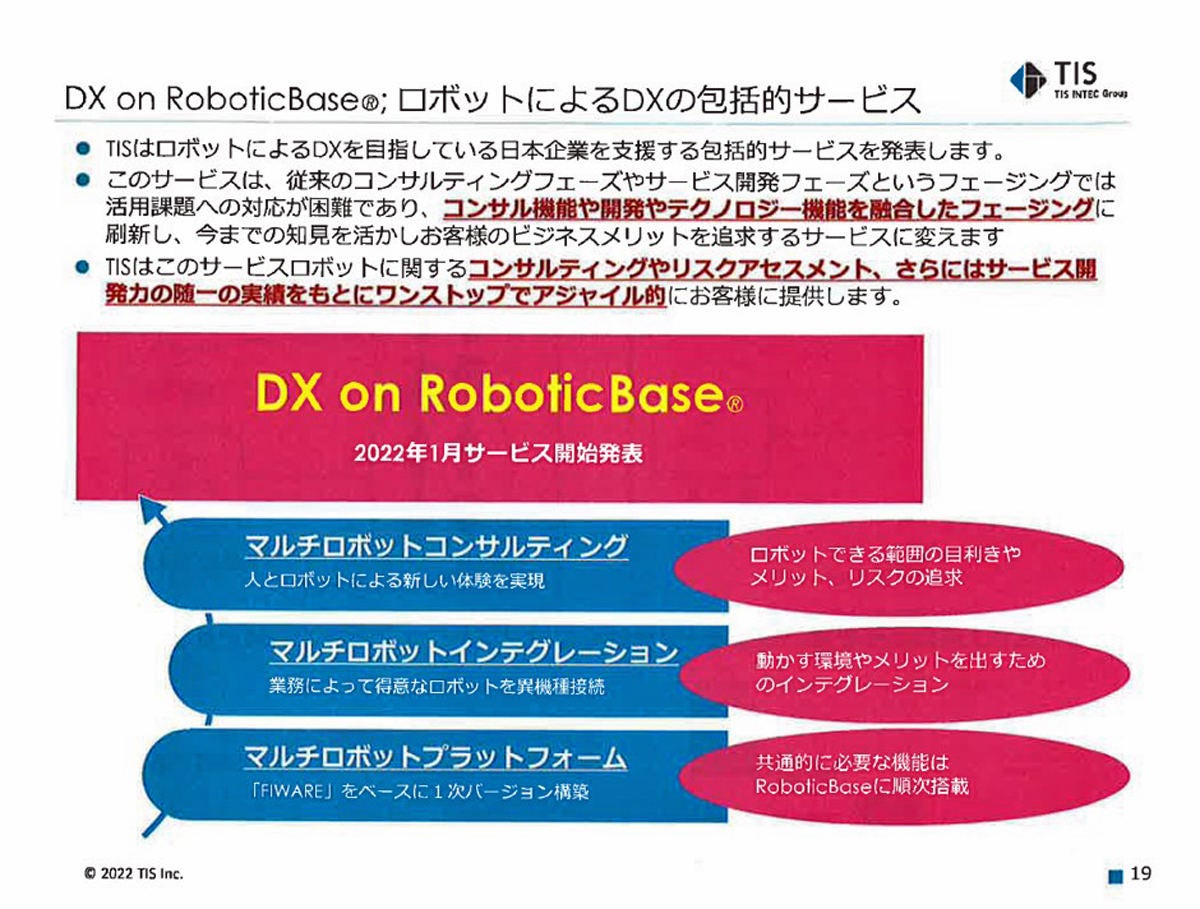
「DX on RoboticBase」として提供するサービスは「マルチロボットプラットフォーム(RoboticBase)」「マルチロボットインテグレーション」「マルチロボットコンサルティング」の3つ。
「RoboticBase」は異なる種類の複数台のサービスロボットを統合管理するためのプラットフォームだ。案内、警備、清掃など、目的が異なるサービスロボットと各種センサーやカメラなどのIoT機器を一元管理可能で、施設管理システムや企業システムとの連携を実現する。
-
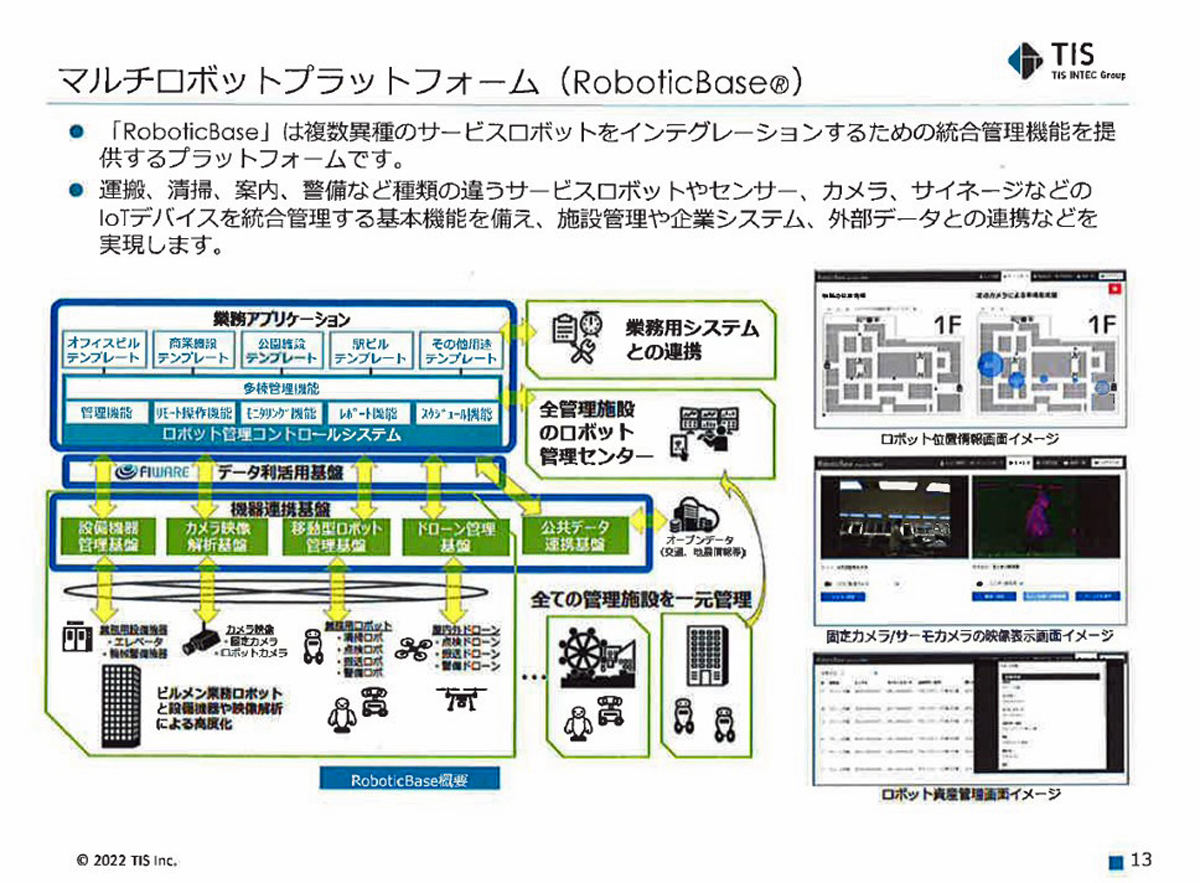
「RoboticBase」のサービス概要

「マルチロボットインテグレーション」は「RoboticBase」を中心として、複数のサービスロボットを統合的に管理し、人とロボットが共生する環境を構築するという。
-
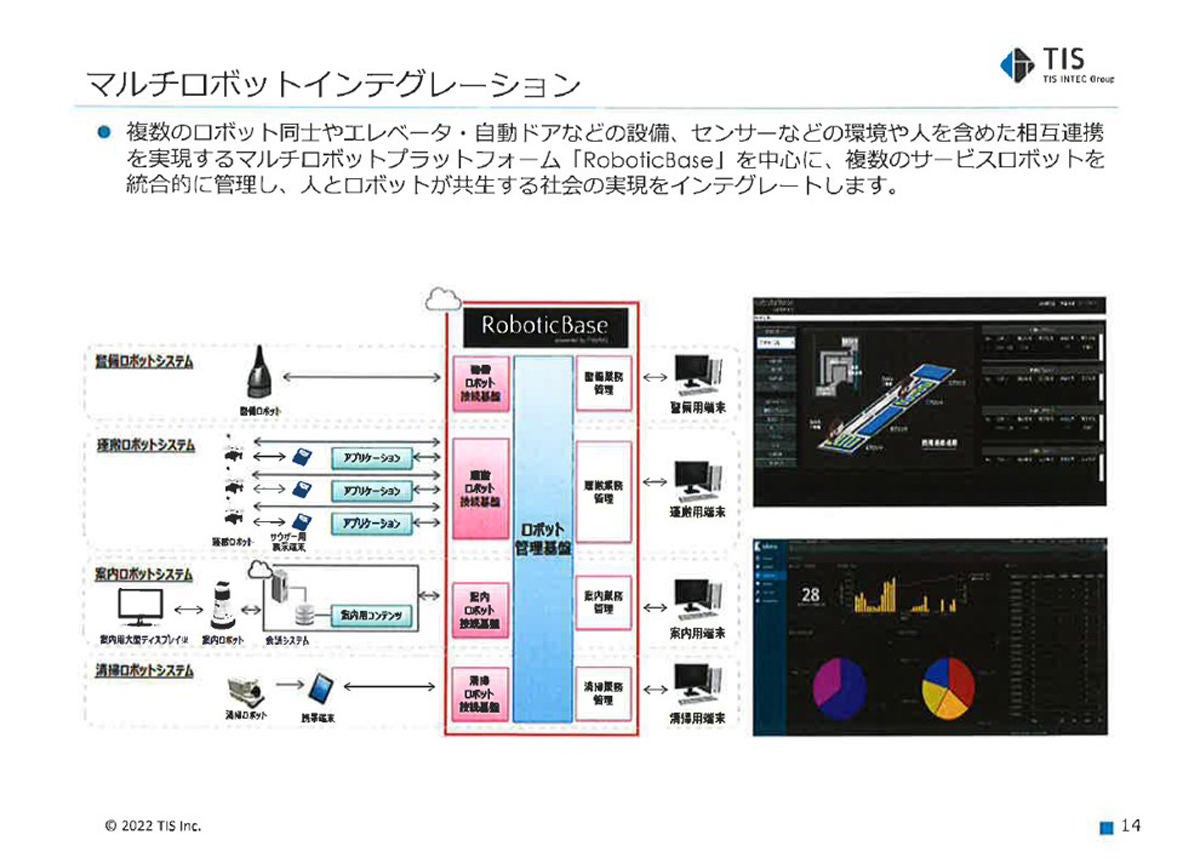
「マルチロボットインテグレーション」のサービス概要

「マルチロボットコンサルティング」では特定のベンダーの製品に依存しない中立的な立場として、同社がSIerとして蓄積してきたノウハウを提供する。これまでにロボットシステムの開発に携わってきた経験と組み合わせることで、ロボット活用の企画、導入、検証、運用までワンストップで支援するという。
-
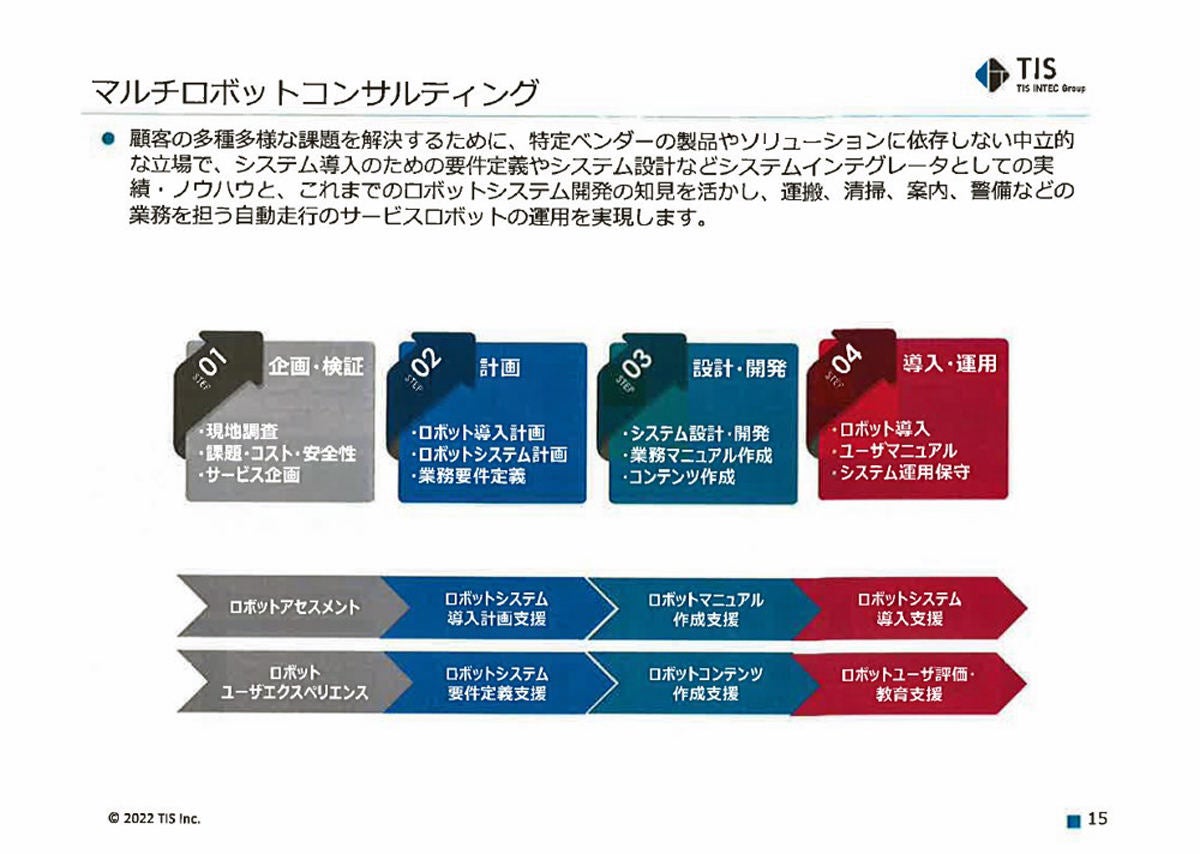
「マルチロボットコンサルティング」のサービス概要

コンサルティングの初期段階では、経営課題を明確化した上で課題解決に向けたワークショップを実施する。この段階で具体的に狙うビジネスメリットを明確にすることで、「ロボットを導入したものの実務では活用しきれない」といった失敗を避ける狙いがあるという。現在のロボット技術によって、やりたいことをどこまで実現可能でどこから実現不可能なのかなどを見極めるため、専門的な知見を有する要員が対応するとのことだ。
また、仮にテスト段階で想定と異なる事態が発生した場合には、サービス開発段階まで立ち戻ってガイドラインを見直すケース、ロボットシステムを改良するケース、UXシナリオをデザインし直すケースなど、包括的に改善策を提案する予定だとしている。
同社のビジネスイノベーション事業推進部のシニアエキスパートである荒木幹男氏は、「現在のロボットは特定の作業に特化したものが多く、業務全体を完遂するためには複数のロボットや人を含めた協働が不可欠だ。当社では複数のベンダーが提供するロボットのプロトコルや信号、運用マニュアルの確認まで携わってきた。この知見をサービスとして生かしたい」とサービス誕生の経緯を語っていた。
-

TIS ビジネスイノベーション事業推進部 シニアエキスパート 荒木幹男氏