コニカミノルタとNECは1月17日、オンラインで記者説明会を開き、ローカル5Gを用いた「未来ファクトリー」構想を具現化する共創の取り組みとして、AGV(無軌道型無人搬送車)の高効率自動制御システムを共同開発したと発表した。同システムは、コニカミノルタの研究開発拠点「Innovation Garden OSAKA Center」(IGOC、大阪府高槻市)で同日から展示公開している。
-

AGVの高効率自動制御システム デモ環境

コニカミノルタとNECが共創
両社では大容量、低遅延の通信が可能なローカル5G環境を備えたIGOCにおいて、2020年11月から5Gを活用したDX(デジタルトランスフォーメーション)推進のための共同開発を進めている。
今回、両社はコニカミノルタの画像AIとNECの自律移動ロボット管制制御ソフトウェアである「NEC マルチロボットコントローラ(MRC)」を用いて、離れた場所から障害物を検知して迂回距離を短縮できるAGVの高効率自動制御システムを共同開発した。
同システムは、コニカミノルタのAI処理の技術群「FORXAI(フォーサイ) Imaging AI」の1つである物体検出アルゴリズムを用いて、AGVに搭載したカメラの画像から数メートル離れた場所にある障害物を検知する。これにより、レーザーレーダーを用いた一般的な制御システムと比べ、AGVの効率的な迂回制御を可能としている。
また、AGVに搭載したカメラで進行方向の視野を確保するため、固定して設置したカメラを使う場合に課題となる死角を無くし、より安全な走行を実現するという。
NEC 新事業推進本部 本部長の新井智也氏は「すでに、AGVは製造現場において活用されているが、多くの課題、高度化の必要性がある。多品種少量生産では現場の環境変化への柔軟な対応が求められ、現状ではあらかじめ決められた軌道上でしか制御できない、あるいは事故を防止するために人間がいるエリアとAGVのエリアを分けるなどの制限がある」と指摘。
-

NEC 新事業推進本部 本部長の新井智也氏

また、今後は運搬するものに合わせて、さまざまなタイプのAGVを利用することが必要になるため、個別に管理すると煩雑になることから、連携した制御が難しいことに加え、効率的な生産のためには生産管理システムをはじめとした業務システムなどとの連携も重要になるという。このような背景もあり、同社ではMRCを提供している。
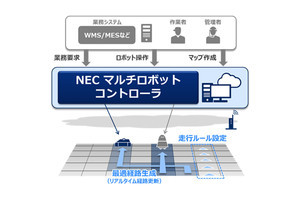
MRCの特徴は「最適経路生成」「複数タイプのAGVに対応」「業務システムとの連動」の3つ。最適経路生成については現場状況に適応し、AGVに最適な走行毛糸をリアルタイムに計算するほか、一方通行や一時停止などのルールを設定することで現場運用に沿った走行経路を生成する。
-

「NEC マルチロボットコントローラ(MRC)」の概要

制御モジュールを追加することで、さまざまなAGVを制御することに加え、上位システムAPIにより業務アプリや生産設備など、他システムと連動してAGVを管理・制御できる。新井氏は「これらの特徴を備えたMRCに、干渉の少ない無線ネットワーク、大容量無線通信、リアルタイム制御などの特徴を持つローカル5Gを適用することで、さらなる付加価値を提供する」と力を込める。
-

MRCにローカル5Gを適用している

未来ファクトリーの実現に向けて
一方、コニカミノルタのIGOCでは、これまで培ってきたハードウェア、画像処理などの情報機器、光学、センサをはじめとした産業光学、画像AI、IoTといった技術開発をベースに高槻サイトで画像IoTの価値創出や独自センサ開発、エッジシステム開発を、梅田グランフロント大阪ではサービスシステム開発(クラウドソリューション)、オープンイノベーション(産学連携、共創)をそれぞれ行い、5G環境を構築し、画像IoT事業を展開している。
-

IGOCではパートナー企業、研究・教育機関に共創の場を提供している

FORXAI Imaging AIの物体検出アルゴリズムは、複数種の物体に対してIntel Core i7で100fps以上という高速での物体検出を実現しているという。さらに、FORXAIマネジメントコンソールを活用することで、AGVに搭載しているカメラやロボットの死活監視や稼働制御、それらデバイスにインストールされたAIアルゴリズムをリモートでアップデートすることでメンテナンス作業の効率的な運用を可能としている。
未来ファクトリー構想は、同社が考える2030年の生産の姿で、工程ごとに共通の産業用ロボットを用いて多品種生産を可能とし、工程間のモノの移動も自動化が進んだ工場、と定義している。同構想ではは「人と機械が共存する安全・安心ファクトリー」と「多品種・小ロット生産を実現する自律型デジタルジョブショップ」を目指している。
-

未来ファクトリー構想の概要

同構想のもと、開発したAGV高効率自動制御システムは、AGVから離れた距離の障害物や人を検出することにより、迂回のための軌道制御が効率化できるとともに、AGVが人と衝突するリスクを回避でき、安全・安心な現場環境の構築に寄与するという。
近年ではユーザーニーズの多様化で生産現場ではマスカスタマイゼーションが進んでいるほか、環境への配慮から「必要な物を、必要な分だけ、必要な場所で生産する」という考え方も広まり、多拠点、多品種、小ロットの生産が求められている。
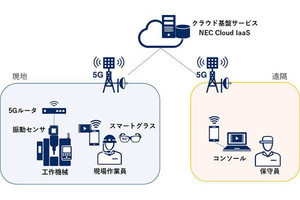
そのため、クラウドでの遠隔監視に加え、ローカル5Gを活用して産業用ロボットやAGVをリモート制御することで、多拠点にある生産工程を集中管理センターからリアルタイムに制御することができるようになり、生産の効率化が図れるという。
-

システムの全体像

同社では「カメラ画像によるAGVの高効率制御」「大容量・低遅延の無線通信」「AGV/ロボットなど生産機器制御」の3つの側面からNECとの共創を進めている。カメラ画像によるAGVの高効率制御に関しては、FORXAI Imaging AIの活用で長距離での障害物検知し、AGV搭載カメラによる死角を排除し、ローカル5Gによる大容量・低遅延の無線通信を実現。また、MRCとFORXAI IoT Platformの活用によるリモート集中制御を可能としている。
-

AGVの高効率制御の概要

-

大容量・低遅延の無線通信の概要

-

MRCの管理画面

コニカミノルタ IoTサービスPF開発統括部 統括部長 兼 画像IoTソリューション事業部 副事業部長の岸恵一氏は「当社ではFORXAIと5Gの活用でパートナーとの共創により、多様なデジタルソリューションを開発・提供し、継続的なイノベーションを創出していく。未来ファクトリー構想の実現に加え、さまざまな社会課題を当社のイメージング技術で解決していく」と述べていた。
-

コニカミノルタ IoTサービスPF開発統括部 統括部長 兼 画像IoTソリューション事業部 副事業部長の岸恵一氏

今後、両社はローカル5G環境下で多数のAGVをMRCにより集中制御することで、数百台のAGVが同時に稼働する状況においても、大容量・低遅延通信による安全な自動運行制御を目指す考えだ。