


日立Astemoは5月17日、車両周辺環境の3Dセンシング結果を活用し、狭路などでも安全かつスムーズに対向車と協調してすれ違うことができる自動運転技術を開発したと発表した。
-
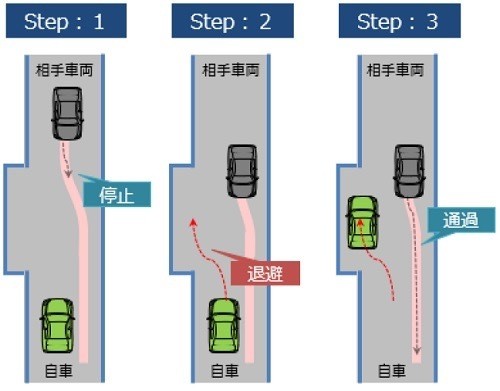
相手車両の行動を認識しながら段階を踏んで相手車両との協調行動を実施

日立Astemoが新たに開発したのは、LiDARなどによるセンシングで得た三次元情報を統合し、車両周辺の走行環境を立体的に認識するとともに、検知したフリースペースや対向車両の挙動から進行意図を理解して経路予測を行うことで、対向車両と協調した狭路でのスムーズなすれ違い自動運転を可能とする技術。
将来的には、汎用性を高めた高精度な新型ステレオカメラ(2023年3月より発売)との連携を視野に入れているという。この新型ステレオカメラは、遠方検知と広い画角を両立させるだけでなく、予め機械学習の手法で識別パターンを記憶させることで、高い精度で歩行者や自転車を検知し測距を可能とし、特に交差点右左折時の衝突防止に貢献する。
さらに、同社が保有するAI技術や認識技術を生かし、コスト競争力のある電子制御ユニット上で高度な画像認知や車両制御を可能とするソフトウェア処理を実現しており、新型ステレオカメラと連携させることで狭路での協調行動を可能とする自動運転技術のコスト競争力を高めるとしている。
なお、日立Astemoは、5月24日〜26日にパシフィコ横浜で開催される「人とくるまのテクノロジー展2023 横浜」の同社ブース(小間番号 : 148)において、狭路での協調行動による自動運転技術や新型ステレオカメラを紹介予定とのことだ。














