ispaceは4月26日、同日未明より開始したランダーの月面着陸運用について、経緯を報告した。それによると、着陸シーケンスはほぼ計画通りに進み、あとは接地するだけ、という最終段階まで行ったものの、高度データに誤差があり、高度がマイナスになっても降下が継続。そこで燃料が尽きてしまい、月面に落下して通信が途絶えた模様だ。
-

会見に出席した袴田武史CEO(中央)、氏家亮CTO(左)、野﨑順平CFO(右)

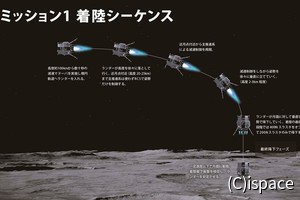
同社の「HAKUTO-R」ミッション1ランダーは、この日0時40分くらいより着陸シーケンスを開始。主推進系による減速やRCSによる姿勢制御などは正常に実行され、姿勢を垂直に維持したまま月面に近づく最終降下フェーズまでは、まさに完璧な運用だった。
ランダーは徐々に高度を下げ、着陸の直前には、予定通り400Nスラスタをオフにしたことを確認。200Nスラスタのみで降下を続け、減速も十分に行い、いよいよ着陸という瞬間を迎えたが、異常が起きたのはこのときだった。
予定通りであれば、すぐに地表との接触が確認できるはずなのに、そのシグナルは一向に届かない。高度データはゼロを過ぎ、本来ならあり得ないマイナスの数値になってしまったものの、その状態になっても、ランダーは降下を続けていたという。
-

着陸予定時刻を過ぎた管制室の様子。着陸が確認できないまま、ジリジリと時間が流れた

ランダーは、着陸が確認できるまで、数m/s以下のゆっくりした速度を維持したまま降下を続ける設計になっていた。しかし、速度を抑えたホバリングのような状態は、燃料の消費が激しい。しばらくは降下を続けていたものの、最後は燃料が尽きてしまい、その後に自由落下したようなデータが得られているという。
ランダーは地表に激突した衝撃により破損し、通信が途絶えたと考えられる。ある程度の速度なら着陸脚で衝撃を吸収できる設計にはなっていたものの、それを上回る速度で落下した可能性が高い。同社が設定した10段階のマイルストーンは、8段階(サクセス8)までの達成、という最終結果になった。
-

この日のライブ配信イベントでは、大勢の社員が着陸運用を見守った

最終降下フェーズにおいて、ランダーの高度はレーザーレンジファインダとレーダーベロシメーターという、2種類のセンサーで計測していたという。レーザーレンジファインダは光を使った測距センサーで、主に遠い距離で使用。レーダーベロシメーターは電波を使うセンサーで、主に近距離で速度を計測するものだという。
今回の失敗の直接的な原因はこの高度データの異常と言えるが、ハードの問題なのかソフトの問題なのかなど、詳細は現在調査中とのこと。なぜ、あるはずのない場所に地面を検出してしまったのか。それが最大の謎であるが、今後さらに解析を進め、結果が出たら報告するとした。
-

ランダーの1/1スケール模型。今回は7つのペイロードを搭載していた

やり直しができない、一発勝負の月面着陸において、最も難しいのは、速度と高度をほぼゼロにするまで、機体の制御を正常に行うことだ。失敗したとはいえ、同社のランダーは初フライトながら、この最も難しい部分を完璧に成功させたのは、大きな成果だと言える。高度の誤差さえなければ着陸に成功していたはずなので、本当に惜しかった。
袴田武史CEOは、「月面に着陸する直前まで通信が確立し、データを獲得できたのは、非常に大きな達成だと考えている」と強調。「これにより、今後のミッション2、ミッション3のために、着陸の成熟度を上げる作業をこれから行うことができる。次に向けた大きな大きな一歩だ」と、しっかり前を向いた。
今回、世界初の民間月面着陸、日本初の月面着陸を実現できなかったのは残念なものの、同社はもともと、月面への輸送事業を継続的に行っていく計画だった。初ミッションで月面の一歩手前まで行けたというのは、宇宙開発の難しさからすれば、十分過ぎるほどの成果だと言えるだろう。次回こそ、成功を期待したい。
同社は、次のミッション2を2024年、ミッション3を2025年に行う予定。ミッション3ではより大型化した「シリーズ2」ランダーを初投入する計画だが、ミッション2は今回と同じ「シリーズ1」ランダーを使う。ただ、高度データ以外に特に問題は無かったので、それほど大きな設計変更は必要無いのではないだろうか。
-

ミッション3では、大型化した「シリーズ2」ランダーを使う予定だ