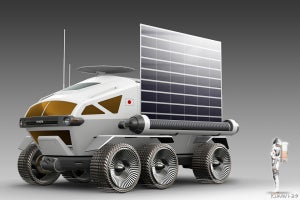
日産自動車は12月2日、宇宙航空研究開発機構(JAXA)と共同で研究開発を進めている月面ローバの試作機を公開した。
月探査に必要となる探査ローバだが、月面はレゴリスと呼ばれる細かな砂で覆われ、さらに起伏に富んだ場所が多く、昼夜の寒暖差も激しいといった過酷な環境であり、そうした諸条件に対応する高い走破性、高効率な走行性能などが求められることとなる。日産は2020年1月よりJAXA宇宙探査イノベーションハブで進められている共同研究に参画。電気自動車開発で培ってきたモーター制御技術や、電動駆動4輪制御技術「e-4ORCE」を応用する形で、月面ローバの駆動力制御に関する研究をJAXAとともに進めている。
この共同研究ではe-4ORCEを進化させ、砂地などの過酷な環境下での走行性能を高める技術開発が進められているという。具体的には、路面状況に応じてタイヤの空転量を最小限に抑え、さまざまな路面環境において走行性能を高める駆動力制御を研究・開発しているという。タイヤの空転量を最小限に抑えることは、砂地でのスタックを回避できるだけではなく、空転によるエネルギーロスを最小化することにもつながり、結果として走行エネルギーを効率化することにもつながることから、日産では、こうした技術開発が、月面で走るローバだけでなく、地上で走るクルマの走行性能の向上にもつながるとしている。
なお、日産では、今回の共同研究を通じ、テストカーの開発で得た日産の知見と、ローバの研究で得られたJAXAの知見を互いに共有することで、地上を走行するクルマと宇宙探査の両面で技術を進化させることを目指すとしている。
日産がJAXAと共同研究中の月面ローバ試作機




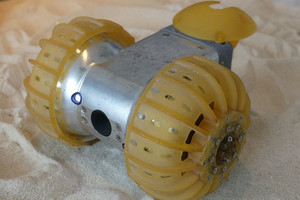
日産とJAXAが共同研究中の月面探査機の試作機