将来、高速道路を1車線も止めることなく、すなわち渋滞を発生させずにトンネル内や橋梁、舗装道路など道路インフラの点検作業を行うことができるようになりそうだ。渋滞させずに点検できることを目指すプロジェクトが動き出した。
トンネルや橋梁など高速道路インフラの老朽化が進んでおり、2012年の痛ましい笹子トンネルの崩落事故はまだ記憶に新しい。トンネル内には排煙用のジェットファンや天井板など重い設備を止めるボルトは、地震やクルマの走行による揺れなどで緩み、劣化が進むため、点検は欠かせない。しかし、点検作業工事による通行止めはドライバーにとってイライラの種になる。
京都大学とミネベアミツミが協力して、IoTを使ったトンネル天井板落下を防ぐための実証実験を、10月19日~24日に5日間に渡って行うことになった。
目標は、一般車両の走行と同様に時速80kmで高速道路を走れば通行止めをせずに済む。ただし、今回は走りながら無線で点検作業を行う実験として時速50km/時で行う。
ボルトの緩みを歪ゲージで測定し、そのデータを無線で受け取るという想定を描くが、今回はボルトそのものではなく、ダミーセンサを用いて実験する。理想は、走行する自動車から無線でボルトに給電し、ボルト内の回路を動作させて、歪ゲージのデータを送信して点検車に送るというもの。ボルトには電池を入れず、無線給電を利用する。電池や有線電源を使わないエネルギーハーベスティングである。
京都大学生存圏研究所の篠原真毅教授らのグループは、長年マイクロ波によるワイヤレス給電の研究をしてきており、電池のないセンサへワイヤレス給電の実験も行ってきた。ただし、ワイヤレス給電は電波を利用するため規制が厳しく実用化は容易ではなかった。今回、京都府の協力を得て国家戦略特別区域制度を活用することで、近畿総合通信局から京都大学が電波使用免許の発給を受けた。この社会実証実験は、京都府宮津市の地蔵トンネル避難抗において行うことになった。
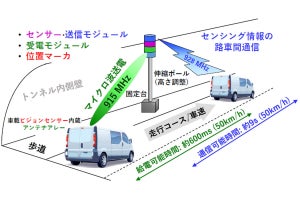
目標とする実験では(図1)、まず、(1)トンネル内のセンサの位置を確認するため、高速カメラでセンサ部分を認識し、(2)センサに向けてマイクロ波を照射する、(3)マイクロ波を受けたセンサモジュールで、直流に変換し電源を作り、歪ゲージで歪量を測定しA-D変換しマイコンでセンサの番号や歪量、時刻などのデータを点検車両へ送る、(4)点検車が正確に受け取ったかどうかを検証する。この一連の作業を時速50kmで走りながらセンサからのデータを検証する。
-

図1 計測車両には12個×4列のアレイアンテナと高速のビジョンセンサを搭載、目的とする歪ゲージに目掛けて12個のアンテナから給電する (資料提供:京都大学/ミネベアミツミ、以下同じ)

こんなことができるのだろうか、と疑問を持たれる方は多いかもしれないが、実は篠原教授らのグループは、個々の実験をこれまでも行ってきた。個々の技術を紹介しよう(図2)。最初の、高速カメラでセンサの位置を認識する実験では、センサの位置を検出したら、センサとクルマのアンテナの角度を求める。高速画像処理技術では、フレームレート1000fpsという高速の映像を捉えると、1msごとにアレイアンテナの指向性制御角度を出力する。
-

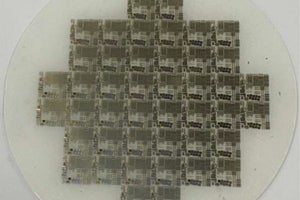
図2 開発した個々の技術を組み合わせ、今回の実証実験に利用する

次にマイクロ波送電では、48素子のアレイアンテナを使いビームフォーミング技術を使ってターゲットとなるセンサへ電波を送る。マイクロ波は915MHzの免許不要の周波数帯を利用して、出力は10W。高速画像処理装置からセンサへの角度情報を受け取ると、12×4個のアレイアンテナの内、水平方向の12個の各アンテナの位相を1msごとに少しずつ変えながら、1つのセンサに向けて12個のアンテナから一斉にマイクロ波を発射する。約600msの間、電波を送信し続ける。アレイアンテナは、水平方向±75度のビームの位相を制御できるという。
マイクロ波を受信したセンサ内では、まずマイクロ波を直流電圧に替え、回路を動作させる。回路内では、歪ゲージセンサで歪の量を測定する。歪ゲージはミネベアミツミが2017年に開発した高感度のセンサであり、これまでの歪ゲージと比べ感度が500%も高いという。歪ゲージは歪が加わると抵抗値が変わることを利用したセンサで、抵抗を4個用いるホイートストンブリッジで感度良く検出することが多い。
検出した電圧をA-D変換し、デジタルデータをマイコンで処理し、送信するための通信モジュールからクルマに向けてマイクロ波を発射する。
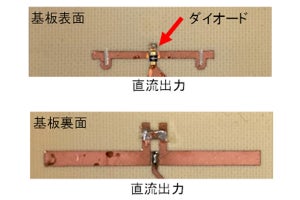
これら一連の動作の内、例えば時速80kmでトンネル内に配置した位置マーカーを検出・追跡する技術は実験に成功している(図3)。この場合も高速のビジョンセンサで位置マーカーを検出し、マイクロ波のアレイアンテナで位置マーカーに電波を送り、少し離れた送信用のポールから電波を送信し、クルマで受信するという実験であった。
-

図3 高速ビジョンセンサでターゲットを見つけその位置との角度を出力し、その情報に基づいてターゲットに向けてマイクロ波を送信、センサ情報を送り返す

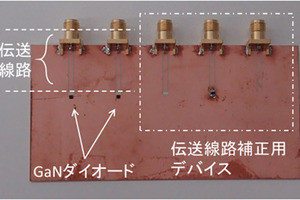
また、センサにマイクロ波を照射して、センサからの情報を受け取るという実験も成功している(図4)。電池レスのセンサモジュールをボルトのアタマに取り付け、増幅器付きの歪センサ部分をボルト内に埋め込み、ボルトの軸力を測定することで、ボルトの緩みを検出する。ただし、今回の実験ではこのボルトのついたセンサモジュールは未だ含まれていない。
-

図4 電池レスセンサモジュールのプロトタイプ

今回の実験では、高速のビジョンセンサが位置マーカーを確実にとらえること、さらにアレイアンテナがマイクロ波ビームを位置マーカーに照射し、所定の電力を送電できていることを中心に評価する(図5)。送電した電力をダミーセンサが受信した電界強度をデータとして、928MHzで別のダミーセンサからクルマへ送信、解析して確認する。
-

図5 実験は、京都府宮津市の地蔵トンネル内で行うが、一般車両が通行しない避難坑内の全長3692mで行われる

これらの実験が成功すると、ボルトの送受信機を時速50kmでとらえられるかどうかの実験へと進む。さらにその先は時速80kmという高速道路での点検が可能かどうかの実験になる。実用化には実験を重ね、1つずつできていることを確認しながら進めていく。