京都大学(京大)は2月5日、自重で垂れ下がったひもを別の物体の周りに巻き取るという現象においてこれまで不明だった、巻き付いたひもの形態やその形成メカニズムの問題に対して、弾性体(ゴムやバネなど、力を掛けると変形するが、力をなくすと元に戻る性質を持つ物体)のひもを用いたモデル実験と数値シミュレーション、弾性理論を組み合わせた研究を行い、ひもが棒に巻きつく際の巻き付き形状と間隔が、ひもの硬さ・太さ・長さと、巻き付かれる棒の太さに依存することを明らかにしたと発表した。
-
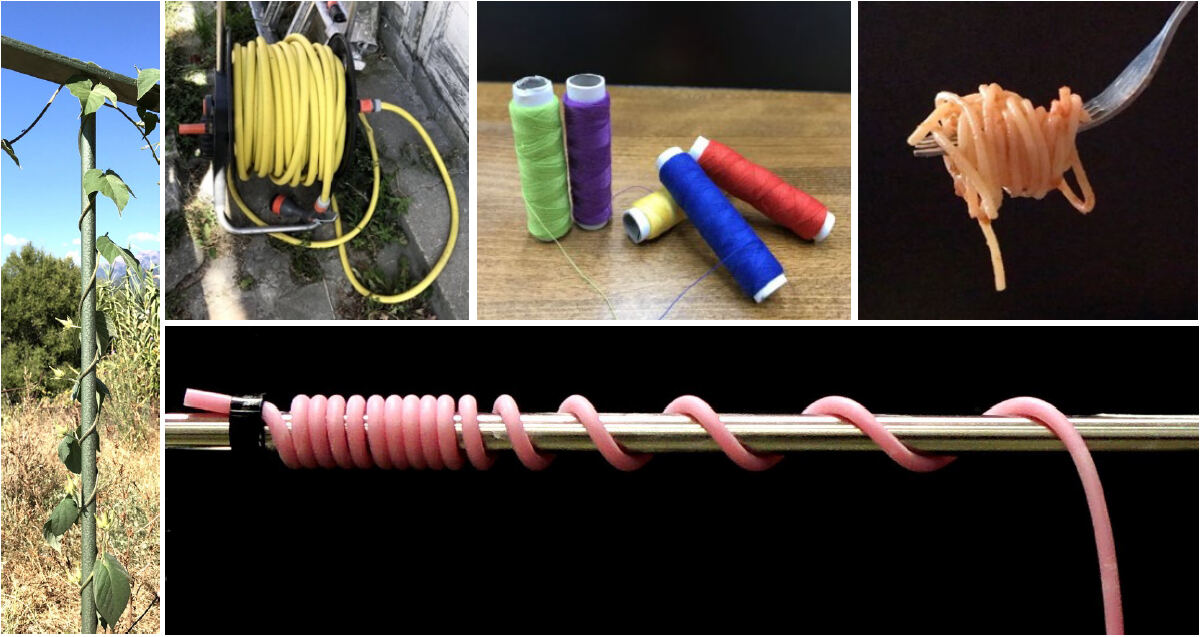
身の回りにみられる巻き付き形状(朝顔の蔓、ガーデニング用の水撒きホース、糸、スパゲッティ)と、実験で得られた巻き付き形状(画像撮影はいずれも谷助教)(出所:京大プレスリリースPDF)

同成果は、東京都立大学の谷茉莉助教(現・京大 理学研究科 助教)、立命館大学の和田浩史教授らの共同研究チームによるもの。詳細は、米国物理学会が刊行する機関学術誌「Physical Review Letters」に掲載された。
ひも状の物体は、DNAのような生物の体内にある極小のものから、植物のつたやヘビなどの生物、麺、そば、パスタなどの食べ物、糸やひも、ロープ、ホースなどの素材や道具など、実に数多く存在する。それらに共通した性質として、同じ素材で作られたブロック状の物体に比べて曲げ変形やねじれ変形が起こりやすく、それもしなやかに変形することが挙げられる。物体の形状や構造と力に関する研究の歴史は古いものの、弾性体と幾何形状の変化が絡み合う問題に関しては、その複雑さゆえに理解が進んでいないことが多いという。
ひも状の物体に関しては、たとえば糸やひも、ロープ、ホースなどを収納する時や、パスタをフォークで食べる時など、別の物体に巻き付けることが多い。ひも状の細長い物体を別の物体に巻きつける際、大抵の場合で人は経験的に最適な巻き付け方を身につけている。しかし巻き付ける物体の形状によっては、巻き付けることが難しい場合や、綺麗に巻きつけられない場合があり、特に、外力をかけずにひもの自重のみがかかっている状況での巻き付きに関しては、巻き付きの可否が何によっているのか、巻き付きの間隔はどのように決まるのかといった点について、これまで理解されていなかったという。そこで研究チームは今回、硬さや太さが異なる弾性体の均一なひもを作成し、実験を行ったとする。
-
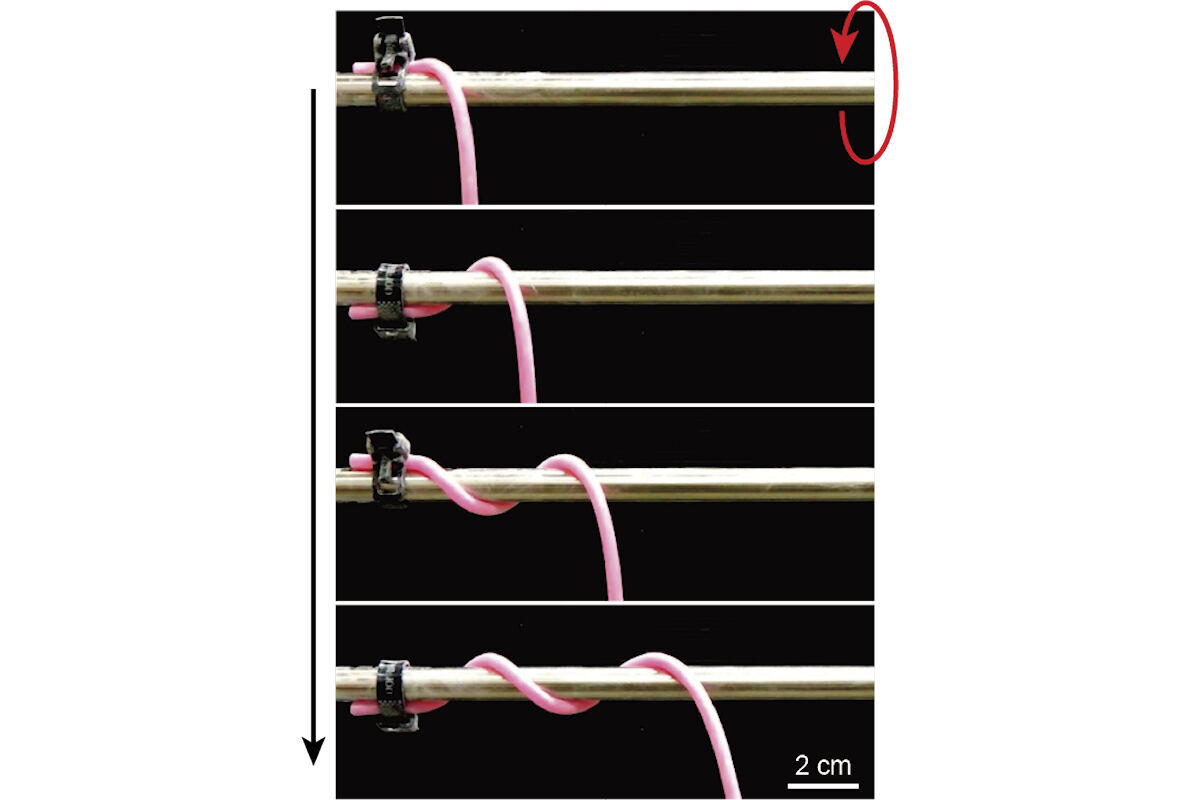
モデル実験。弾性ひもの一端を円柱に固定し、円柱をゆっくりと回すことで、ひもを巻き取る(出所:京大プレスリリースPDF)

ひもの一端を水平に置かれた円柱に固定すると、ひもは重力で下に垂れ下がる。この状態で円柱をゆっくりと回すと、ひもは徐々に円柱に巻き付いていくことが改めて確認された。また、ひもが隙間なく密に巻き付く場合と、らせん状に巻き付く場合、さらには、巻き付かない場合があることがわかったとのこと。それらに加え、巻き付きのパターンが共存する場合があることも判明した。これらの現象は、ひもと円柱の摩擦とひもの「排除体積効果」(ひもは物質なので重なり合うことはできないため、ひもが占める体積分は排除されること)を考慮に入れたモデルを用いた、コンピュータシミュレーションによっても再現できたという。
-
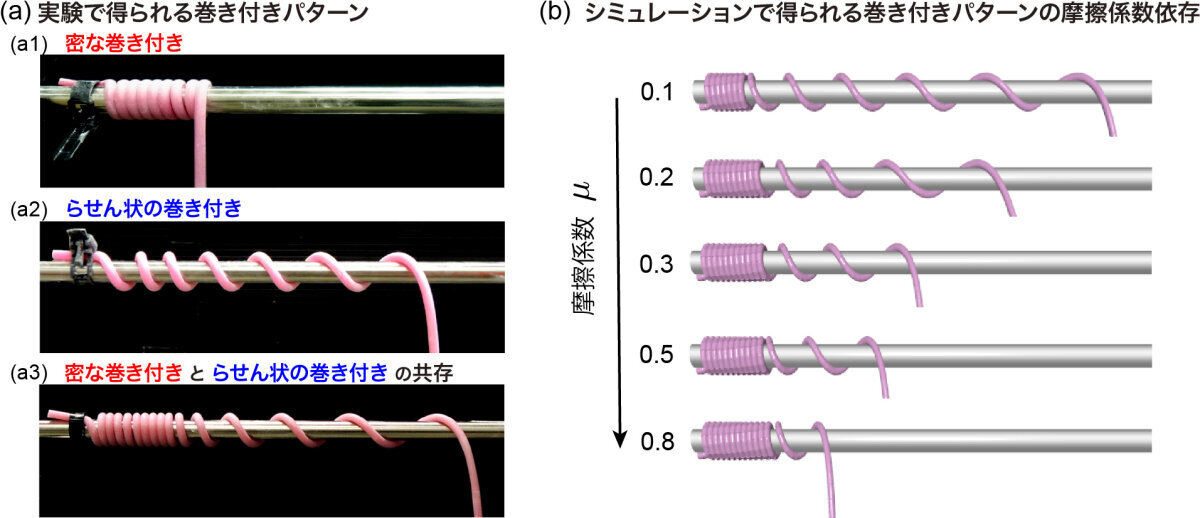
実験で得られる巻き付きパターン(a)とシミュレーションで得られる巻き付きパターン(b)の摩擦係数依存性(出所:京大プレスリリースPDF)

そして3パターンの巻き付き(密な巻き付き、らせん状の巻き付き、巻き付きなし)は、ひもが円柱からぶら下がっている長さや、ひもの硬さや太さ・重さを反映した「重力曲げ長さ」(弾性体のひもに対して、重力と曲げの効果が同程度になる特徴的な長さのこと)、円柱の太さによることが解明され、それらの量を用いて、パターンの状態図を作ることにも成功したとする。また、パターンの境界を弾性理論から説明することも達成された上、巻き付きの間隔を理論的に説明することにも成功したとしている。
-
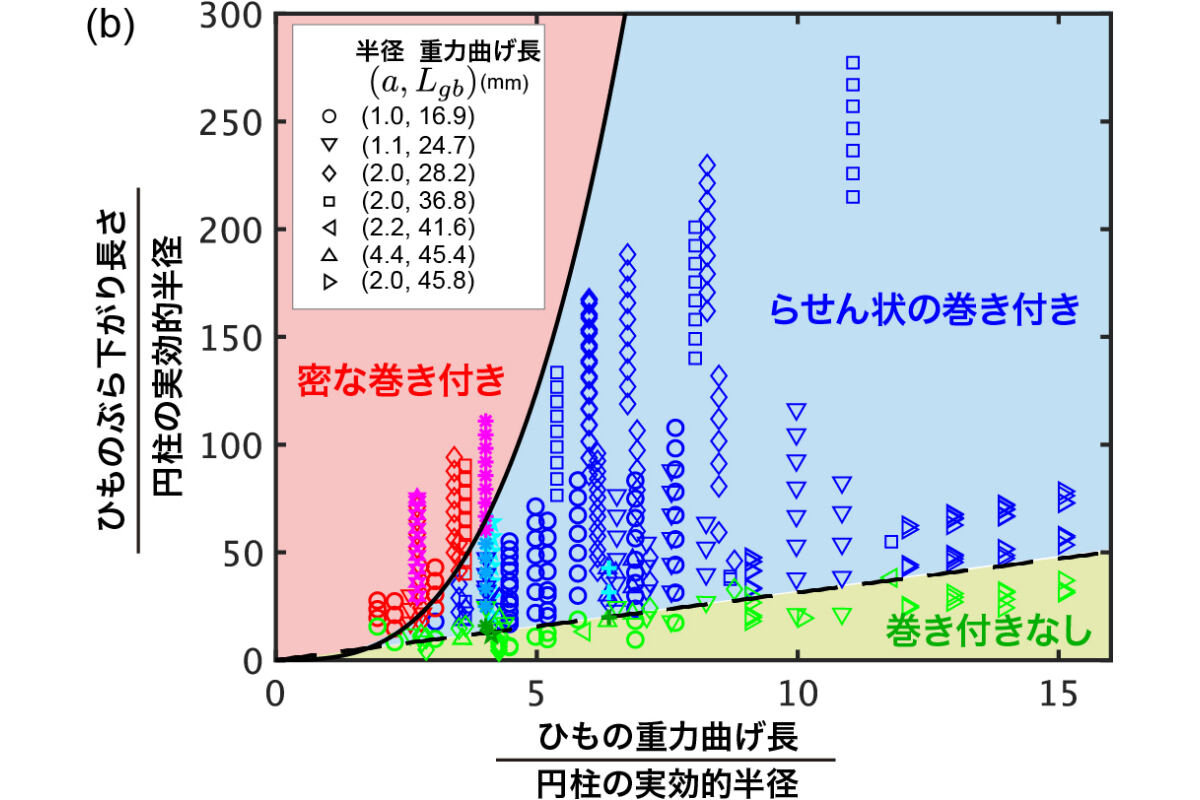
実験で得られた巻き付きパターンの状態図。得られる巻き付きパターンは、ひものぶら下がり長さと円柱の実効的半径の比、および、ひもの重力曲げ長さと円柱の実行的半径の比によることがわかった(出所:京大プレスリリースPDF)

今回の研究により、自重でぶら下がっている均一なひもを別の物体で巻き取る問題に対して、物理実験、数値シミュレーション、解析的理論を総合的に組み合わせることで、巻き付きの形状とその形成メカニズムが解明された。非常に単純なモデル実験に思われるが、弾性力学の理論を用いて全体を理解するには、摩擦や、その都度変わる接触領域の理解など、難しい点が多くあることもわかったとのことだ。
研究チームは、これらの問題に対し、今後さらに単純でより制御された状況で調べる必要があると考えているとする。加えて、近年しなやかに変形する弾性体の幾何形状の変化を弾性力学で理解したり、ソフトロボティクスなどに応用しようとしたりする研究が盛んに行われてきており、今回の成果は、これらの分野へも波及効果があることが期待されるとしている。