日本発の宇宙スタートアップ・ispaceの月面ランダーが、いよいよ11月30日(つまり本日)、米国から打ち上げられる。同社の挑戦が始まってから、すでに12年。その間、紆余曲折がありながらも、諦めることなく開発を続け、ついに打ち上げまで辿り着けたことは、その最初期から取材で関わってきた記者の一人として、感慨深いものがある。
2022年11月30日15時追記:「HAKUTO-R」ミッション1の打ち上げは、打ち上げを行うスペースXのロケット「Falcon9」に一部確認作業が必要となったため、2022年12月1日の17時37分(日本標準時)に延期されました。
-

ロケットから分離されるランダーのイメージCG(提供:ispace)

マイナビニュースでも、これまで多くの記事でispaceについて紹介してきたので、いろいろと思い出す読者も多いだろう。打ち上げを直前に控え、ここで改めて、同社のこれまでの取り組みを振り返ってみよう。
Google Lunar XPRIZEへの参戦
同社のこれまでの挑戦は、大きく前半と後半に分けられる。前半パートで取り組んだのは、月面ローバーの開発である。
そのきっかけとなったのは、月面レース「Google Lunar XPRIZE」(GLXP)だった。このGLXPは、「月面に着陸して500m走ったら優勝」という、いま考えても非常にチャレンジングな賞金レース。これに出場を決めた欧州チーム「White Label Space」(WLS)が、ローバーを開発するパートナーとして、日本に声をかけたのが始まりだった。
-

2010年1月には、都内でWLSチームによるセミナーが開催された

この相談を快諾したのが、東北大学の吉田和哉教授。これにより、欧州側がランダー、日本側がローバーを開発するという日欧協力チームが誕生し、日本チームの母体として、ispaceが2010年9月に設立されている。
2011年8月には、初めてローバーのプロトタイプが公開。10kg以下という厳しい重量制限があるため、小型ながら変形する機能を持たせたという、非常にユニークな4輪ローバーになっていた。
-

中央がファウンダー&CEOの袴田武史氏、左が東北大学の吉田和哉教授

しかし、この欧州チームが早々に脱落。ローバーだけでは月に行けないため、日本チームは存続の危機に陥ったが、他チームのランダーへの相乗りという手段を選択、活動の継続を決めた。いま振り返れば、ここで諦めなかったことが現在へと繋がっており、大きなターニングポイントだったと言えるだろう。
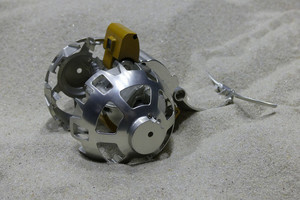
その後、ローバーの開発はさらに進み、中田島砂丘や鳥取砂丘でのフィールド走行試験なども行われた。


中田島砂丘での走行試験(2014年12月)の様子。強風で三脚が倒れて砂まみれになり、1本ダメにしたのも今となっては良い想い出




鳥取砂丘での走行試験(2016年9月)の様子。丸4日間、朝から晩まで広大な砂丘を彷徨いながら取材し、ヘトヘトになった記憶がある


だが、相乗り先のランダーも二転三転。当初は米国のAstroboticに決まっていたのだが、同チームの撤退によって、2016年末にインドのTeamIndusへと変更していた。そのTeamIndusも、GLXPの期限ギリギリになってから、資金不足が判明。結局、打ち上げができないという事態になり、2018年3月末、GLXPは「勝者無し」という形で終了となった。
-

GLXPの終了が決まったときには、同社にて急遽記者会見が開催された