宇宙機関と玩具メーカーという、異色のタッグで開発された月面ローバー、それが「SORA-Q」である。格納時の直径がわずか8cmという超小型サイズのこのローバーは、月面に投下後、走行形態に変形。自分で状況を判断しながら走行し、撮影した画像を地球に送信することができるという。2022年に打ち上げられ、月面へ向かう予定だ。
-
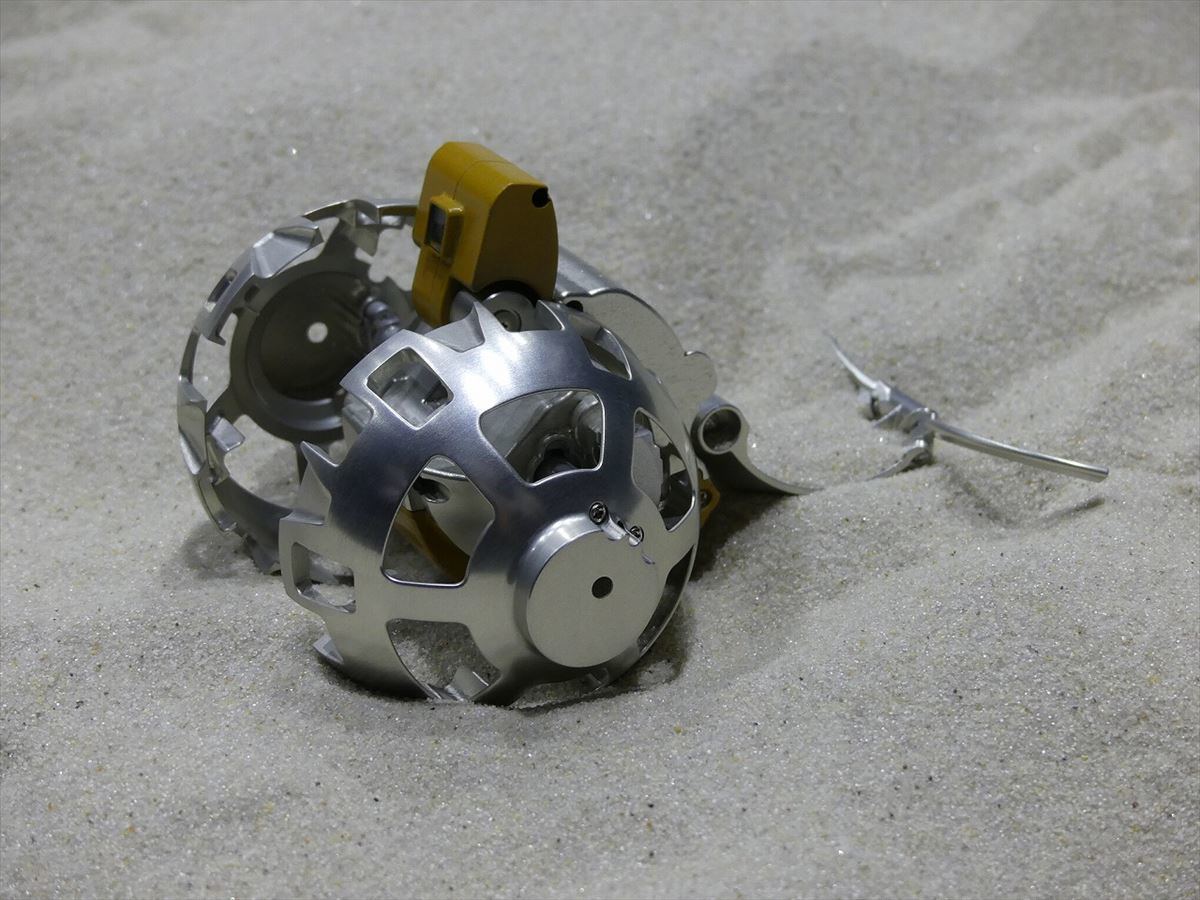
走行形態の「SORA-Q」。左右の2輪だけで月面を走行する

SORA-Qを開発したのは、宇宙航空研究開発機構(JAXA)、タカラトミー、ソニーグループ、同志社大学の4者。この連載では、SORA-Qの技術やミッションなどについて、関係者へのインタビューを交えながら、詳しくお届けしていく予定だ。今回は第1回目ということで、まずはSORA-Qの「動き」をじっくり紹介していこう。
SORA-Qは変形可能な自律ロボット
2022年9月某日、筆者が向かったのはJAXA相模原キャンパス。宇宙探査実験棟1階の宇宙探査フィールドには、月や惑星の表面を模擬した環境が用意されており、ここでは日々、ローバーの走行実験など、様々な研究開発が行われている。
-

JAXA相模原キャンパス。M-Vロケットの向こうの建物が宇宙探査実験棟だ

さすがに月面の重力や真空環境などは再現できないものの、これほどの広さ、かつ安定した屋内環境で実験できる設備というのは、かなり貴重だと言えるだろう。フィールド上には425トンもの砂が置かれ、様々な地形の模擬が可能。今回訪れたときは、斜度が20°くらいという小山が設置されていた。
-

宇宙探査フィールド。広さは17.7×22.6mで、月や惑星を模擬した硅砂が敷かれている

今回の取材では、タカラトミー側が所有している動作検証モデルのSORA-Qを使い、変形や走行の様子を見ることができた。実際に月面へ向かうフライトモデルの機体とはバッテリなど一部に違いはあるものの、それ以外の仕様はほぼ同等。この動作検証モデルの機体は、タカラトミー側にも2台しかないそうだ。
-

カバンから出てきたSORA-Q。簡単に持ち運べるのも、超小型機ならではだ

-

こんな感じで格納されていた。実機は一次電池だが、これは充電池を使う

SORA-Qの大きな特徴は、月面で変形することだ。ランダーに搭載されるときは、直径8cmの球状になり、コンパクトに運ぶことができる。球状ならば、月面に投下されたときの衝撃にも強い。
-

展開前のSORA-Qは、野球のボールとほぼ同じサイズ。うっかり投げてしまいそう

月面に着地したら、半球の外殻が左右にガチャっと展開し、走行形態になる。後方に尻尾のようなスタビライザーも展開し、左右の2輪のみで移動が可能。両輪を前に回せば前進するし、左右で逆回転させればその場での旋回ができる。
-
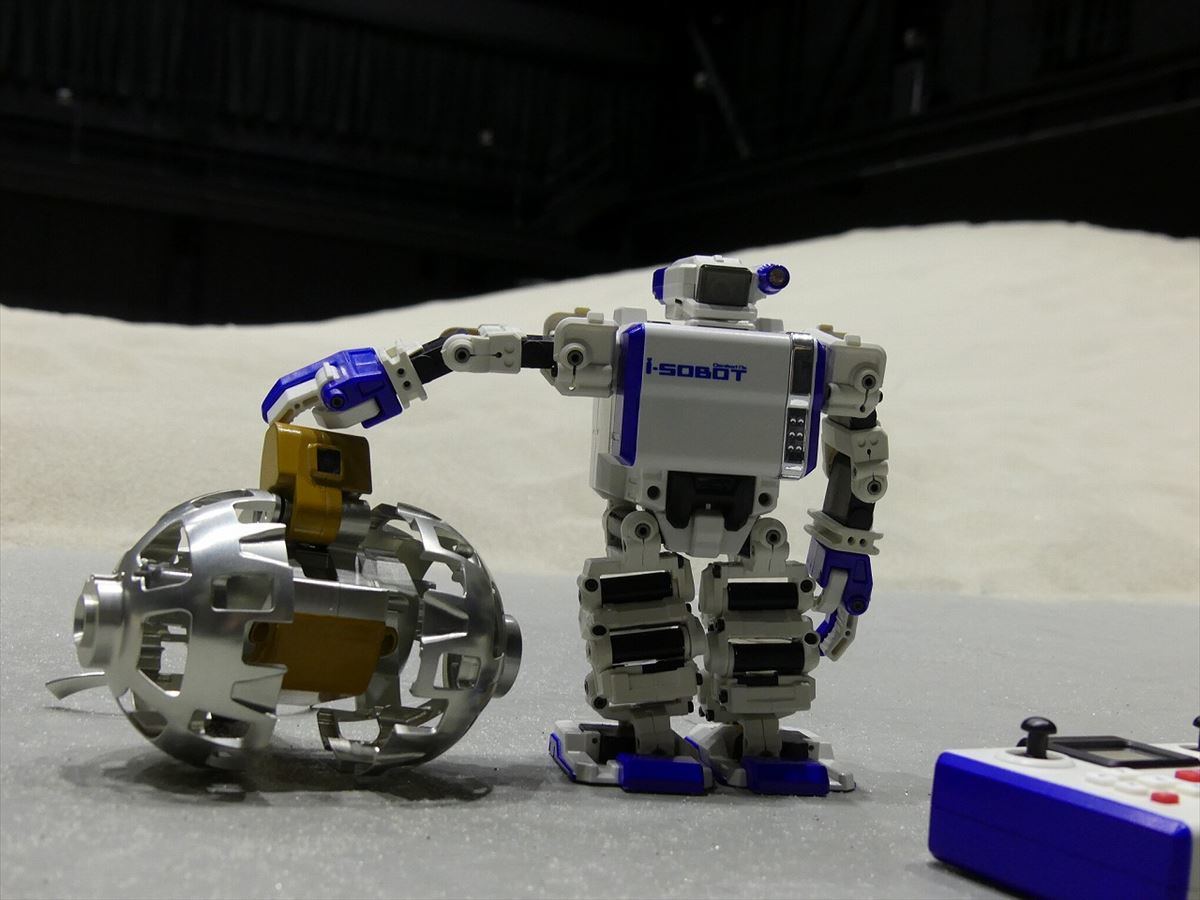
展開後のSORA-Q。サイズが分かりにくいと思ったので、同社製の「i-SOBOT」(筆者私物)と並べてみた

面白いのは、外殻がそのまま車輪になるということだ。一般論で言うと、走行性能のためには車輪は大きいほど有利なのだが、この構造ならば、搭載スペースの厳しい制約の中でも、最大限の車輪サイズを確保できる。超小型ローバーならではの工夫だ。
そして、車輪の回転軸が中心から少しずれている(偏心)というのもユニークだ。これも、超小型サイズで走行性能を向上させるための工夫の1つ。左右で位相を180°ずらした「クロール走行」や、位相を揃えた「バタフライ走行」など、位相の設定によって走行モードを切り替えることが可能だ。
-
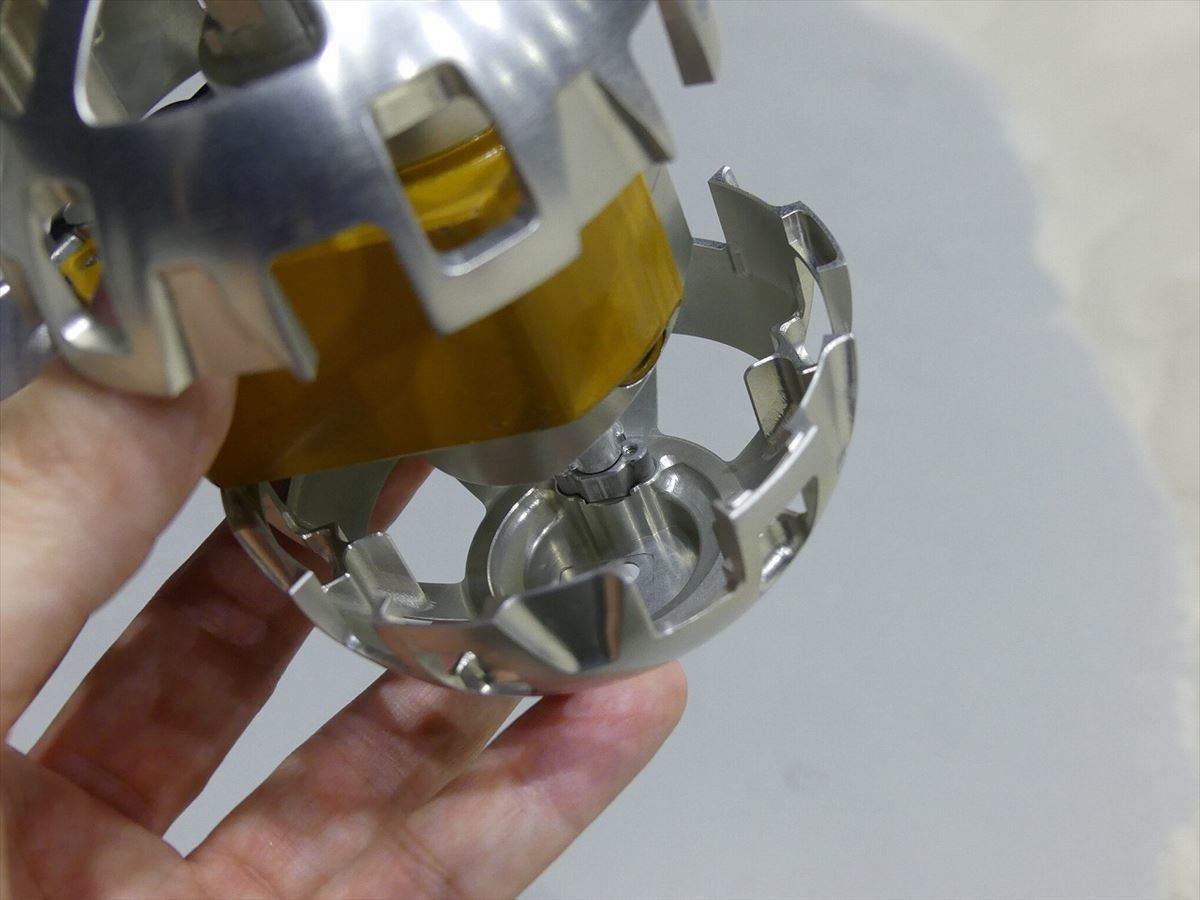
よく見ると、車輪の中心と、シャフトの取り付け位置がズレていることが分かる

山があったので登ってみた
筆者が最も気になっていたのは、こんな“非常識”とも言えるような小さなサイズで(おそらく月面ローバーとしては史上最小だ)、本当に月面を走ることができるのか、ということだった。月面のレゴリスはただでさえ足を取られて走りにくいのに、ここまで小さいと、地形の小さな凹凸であっても、相対的に大きな山や谷になってしまう。
-

ライティングを変えると、本当の月面っぽい雰囲気に。地形の凹凸が分かりやすい

だが、もしこのサイズでも走行できることが分かれば、小型・軽量・安価というメリットを活かし、月面に大量に運んで広い範囲にばらまいたり、他の月面ランダーのほんの小さな空きスペースに搭載したりと、様々な使い方が可能になるだろう。簡単ではないものの、そういう点においても、意義の大きなチャレンジであると言える。
というわけで、早速フィールドを走らせてみた。実際の走行を見て気がついたSORA-Qの特徴は、車輪をかなり空転させているということだ。月や惑星で動作するローバーは車輪をもっとゆっくり回転させ、なるべく空回りしないように走行させるのが一般的なのだが、砂を巻き上げながら進む姿はかなりダイナミック。まさに水泳のようだ。
砂に埋もれながらも前に進むSORA-Q。なんだか不思議な「頑張ってる感」がある
繰り返すが、SORA-Qはとにかく小さい。サイズ的に、どうしてもグリップ力には限界があるので、それならば、空転することを前提に、その分、回転速度を上げれば良いという、割り切った設計なのだろう。
-

轍を残しながら進むSORA-Q。月面でもこんなシーンが実現するだろうか

前述のように偏心車輪は位相を自由にずらせるのだが、取材に立ち会っていただいたSORA-Q開発チームの同志社大学・渡辺公貴教授によれば、月面の様々な地形に対応できるよう、こういった仕組みを実装したという。
-
SORA-Qの開発を主導した同志社大学の渡辺公貴教授。前職のタカラトミー在籍時には、i-SOBOTの開発者でもあったという

投下からの展開も試してみた。今回は思い切って1.5mくらいの高さから投下(月面での投下高度は1.8mくらいの予定)。月面の重力は1/6Gなので、これは本番よりも大きな衝撃のはずだが、渡辺教授はまだまだ余裕の表情。わざと逆さまに落としたり、真横に落としたりしてみたのだが、展開や走行に特に問題は無かった。
わざと変な向きに落としてみたのだが、ちゃんと変形して走行できた
平地の次は、斜面を試してみよう。本番のミッションはバッテリの都合上、数時間程度の稼働となるため、わざわざ山の上に行くことも無いだろうとは思うが、月面ではどんな場所に着陸することになるのか、行ってみないと分からない。場合によっては、起伏の多いところになる可能性も考えられ、登坂能力も重要である。
斜面の走行に挑戦。傾斜は20°くらいあるが、問題無く進めている
局所的な凹凸のある斜面でも、山を崩しながらゆっくり登っていく
さすがに平地に比べると速度は遅くなるもの、それでも、止まらずに登り続けることができたのは驚き。このフィールドには、起伏の少ない斜面と、凹凸だらけの斜面があって、SORA-Qにとっては当然後者の方が厳しいのだが、ここで試しても同じように登ることができた。小さいながらも、見た目以上に走破性能は高そうだ。
-

スキーの上級者コースのように、凹凸だらけの斜面。局所的には20°以上ありそうな感じだ

さらに調子に乗って窪地に逆さまに置いてみた。これでも無事に脱出できる
どちらが先に月へ? 2つのミッション
このSORA-Qであるが、じつは2回のミッションを予定している。
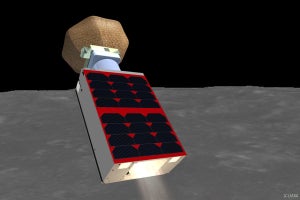
現時点で、最初のミッションになりそうなのは、民間初の月面着陸を狙うispaceのミッション1ランダー。記事掲載時の情報では、最短で11月9日~15日にも打ち上げられる予定で、本当にもうすぐだ。
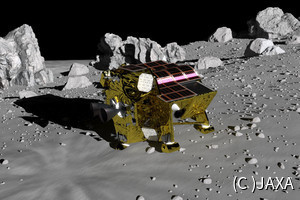
そしてもう1つは、JAXAの小型月着陸実証機「SLIM」。先日、打ち上げが2022年度→2023年度に延期されてしまったが、技術的な不具合などによる延期ではないので、それほど大きな遅れにはならないだろう。
どちらのミッションでも、SORA-Qの仕様はほぼ同じなのだが、搭載する目的がそれぞれ異なるため、動かし方はちょっと違うという。この連載では、今後そのあたりも取材して、お伝えしていく予定だ。
ispaceのミッション1ランダーとJAXAのSLIM。どちらが先に日本初の月面着陸を実現できるのかはまだ分からないものの、それと同時に、SORA-Qが日本初の月面ローバーとなる可能性もある。ぜひ注目して欲しい。