ispaceは1月25日、同社が進めている月面探査計画「HAKUTO-R」について、最新の開発状況を明らかにした。世界初の民間による月面着陸を目指す「ミッション1」は、これまで2022年の打ち上げ予定としてきたが、「2022年末頃」と時期をより明確化。運用の訓練も開始しており、いよいよ打ち上げへ向け、最終段階へと入ってきた。
-

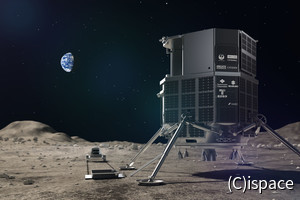
ミッション1ランダーのイメージCG (C)ispace

ミッション1ランダーのフライトモデルは、2021年6月より、ドイツ・ランポルツハウゼンのアリアングループ施設にて、組み立て作業を開始。現在、組み立て・統合の最終工程にあり、今後、多層断熱材(MLI)、ソーラーパネル、展開機構などを取り付け、春頃に最後の環境試験を実施する予定だ。
-

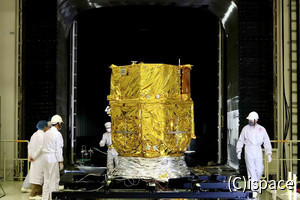
ランダーフライトモデルの組み立て中の様子 (C)ispace

環境試験が無事に完了すれば、ランダーはいよいよ、射場がある米国に輸送される。打ち上げはSpaceXのファルコン9ロケットを使用。今回のランダーは、燃料を節約できる軌道で月に向かうため、到着には数カ月かかり、年末の打ち上げであれば、月面への着陸は年明けの2023年になる可能性が高そうだ。
同社ファウンダー&CEOの袴田武史氏は、「我々がGoogle Lunar XPRIZEをきっかけに月を目指してから、今年で12年目になった。当初のローバーだけでなく、ランダーも開発して自力で月へ行くことを決めてから、様々な困難があったが概ね順調に進んでいる」と振り返り、「ミッションの成功を目指しラストスパートをかけたい」と意気込んだ。
-
ispaceの袴田武史ファウンダー&CEO

ミッション1には、ドバイ宇宙機関の4輪ローバー「Rashid」や宇宙航空研究開発機構(JAXA)の変形2輪ローバーをペイロードとして搭載。ランダーは月面に到着後、この2台のローバーを地表に降ろし、地球との間の通信を中継する。成功すれば、それぞれアラブ初、JAXA初の月面ローバーとなるだろう。
ispaceが独自のローバーを搭載するのは、次の「ミッション2」だ。今回、このローバーの初期イメージが公開された。ローバーを設計しているのは、ルクセンブルクにあるispace Europe。スペックについては言及が無かったものの、本体の形状は従来の台形ではなく、直方体になっているなどの違いが確認できる。
-

ispaceローバーの初期イメージ (C)ispace

なおミッション2の打ち上げ時期については、当初の2023年から2024年へと変更したことが明らかにされた。延期の理由については、「技術開発のスケジュールや顧客の要望を反映させて最終調整したため」(袴田氏)とのことだ。
また今回の報告会では、東京・日本橋に開設したミッションコントロールセンター(MCC)において、シミュレーション訓練の様子も公開された。
MCCは、ランダーからの情報を監視し、ランダーに指示を出す、運用の拠点である。宇宙空間を飛行するランダーにトラブルが発生しても、人間が行って助けることはできない。限られた情報から何が起きているか正確に突き止め、素早く適切な対応を取らなければ、ランダーを喪失してしまう恐れもある。
-

東京・日本橋にあるispaceのミッションコントロールセンター (C)ispace

そういった最悪の事態を避けるために、何より重要なのは事前の訓練である。様々な非常事態を想定し、シミュレーション訓練で体験しておくことで、何が起きても対応できるように備える。運用訓練で筆者が思い出すのは、JAXAの小惑星探査機「はやぶさ2」が初めてリュウグウへ着陸したときのことだ。
このとき、探査機は降下の開始が5時間も遅れたのだが、事前の訓練ですでに経験しており、降下速度を上げるという対応によって、無事に遅れを取り戻すことができた。はやぶさ2は大きなトラブルもなく地球に帰還することができたが、それを支えたのは、厳しい訓練で鍛えられた運用チームだといえる。
今回MCCで公開されたのは、ランダーが月周回軌道を離脱して降下を開始し、着陸するまでの訓練。リアルタイムだと時間がかかるので今回は公開のために短縮されていたが、トラブルが発生し、それに対処する様子を見ることができた。
この公開訓練には、この日ゲストとして呼ばれていた元JAXA宇宙飛行士の毛利衛氏も臨席。久しぶりの運用現場の臨場感に触発されたのか、ispaceの担当者に「降下開始の噴射から着陸までの時間は実際にはどのくらい?」など、ノリノリで質問していた(答えは100分とのこと)。
-

元宇宙飛行士の毛利衛氏(左端)が見守る中、MCCでの公開訓練が行われた