宇宙航空研究開発機構(JAXA)は3月15日、小型月着陸実証機「SLIM」(Smart Lander for Investigating Moon)に関する記者説明会を開催し、ミッションの詳細について明らかにした。SLIMは2022年度中の打ち上げを予定。3~4カ月かけて月へ向かい、高精度なピンポイント着陸を目指す。SLIMには2機の小型ローバーも搭載する計画だという。
-

小型月着陸実証機「SLIM」のイメージCG (C)JAXA

なぜピンポイント着陸が必要なのか?
日本の月探査機は、2007年に打ち上げられた「かぐや」(SELENE)以来。かぐやは月周回軌道から月面を詳細に観測したが、SLIMはその次のステップとして、いよいよ月面への着陸に挑む。
SLIMが狙うのは、目的地付近に正確に着陸する技術の実証だ。かぐやなどによる観測の結果、現在は月面の様子がかなり詳細に分かっている。月面探査では、「あのクレーターの隣のあの岩石が見たい」というレベルのニーズが大きくなっており、そのためには高精度な着陸技術が必要となる。
これまでの月面着陸では、精度は数km以上のオーダーであったが、これではそういった探査は難しい。SLIMプロジェクトマネージャの坂井真一郎氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 教授)は、「SLIMでは100mオーダーを目指す」としており、まさに「ピンポイント」な着陸というわけだ。
-

SLIMプロジェクトマネージャの坂井真一郎氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 教授)

また、小型であるのも大きな特徴だ。SLIMの重量は約200kg(推進剤なし)/約700~730kg(打ち上げ時)、横幅は2.7m。小型機であれば、それだけコストを抑えることができ、限られた予算の中で、探査の高頻度化が可能になる。実際、SLIMはX線分光撮像衛星「XRISM」との相乗り打ち上げにより、低コスト化を実現している。
-

SLIMの概要。打ち上げ時重量の約7割が推進剤となる (C)JAXA/三菱電機

ただ、日本は小惑星探査機「はやぶさ2」で誤差わずか60cmの着陸を実現させた実績があるものの、月のように重力が大きな天体はダイナミクスが根本的に異なる。周回軌道から高速に飛行しながら降下し、途中でやり直すこともできないため、精度を上げるのは本質的に難しい。しかも小型機では、リソースも限られる。
ピンポイント着陸のカギとなるのが、SLIMで採用する画像照合航法である。精度良く着陸するために、まず必要なのは、今どこを飛行しているのか、現在位置を正確に認識することだ。地球であればGPSも使えるが、月にそんな便利なものはない。そこで考えられたのが、月面をカメラで撮影し、その画像から位置を推定する航法だ。
-

SLIMは航法カメラで月面を撮影しながら、自律的に降下する (C)JAXA

画像照合航法では、撮影画像からクレーターを抽出。クレーターの配置パターンを、事前に用意したマップと比較することで、位置を推定する。降下中、探査機は高速に移動しているので、この画像認識をなるべく短時間で行う必要があるのだが、すでに実用的な1~2秒での推定が実現できているという。
-

クレーターのパターンマッチングにより位置を推定する (C)JAXA

そして着陸地点の上空に到達すると、撮影画像から障害物を検出。岩などがある場所は危険なので、そこを避けて着陸する。こういった制御を、SLIMではすべて自律的に行う予定だ。
安全に着陸させるための逆転の発想
SLIMは工学技術実証機であるが、科学観測のための装置として分光カメラを搭載する。無事月面に着陸したら、月マントル由来と考えられる岩石の成分を分析。これにより、月の起源の解明が期待できるという。この観測のためには、狙った場所に着陸する必要があり、「そういう意味でも良いデモンストレーションになる」と坂井プロマネは意気込む。
-

観測対象は限られた場所にしかなく、ピンポイント着陸が必須だ (C)JAXA

着陸地点に選ばれたのは、「神酒の海」にある「SHIOLI」クレーター近傍。しかし問題となるのは、クレーターが近い場所ということで、全体的に緩やかな斜面(15°程度)になっていることだ。斜面だと、着陸時に転倒しやすい。どうすれば安全に着陸できるのか。検討の結果、JAXAが出した答えが「二段階着陸」方式である。
逆噴射でホバリングした後、探査機の姿勢を前に傾け、まず主脚を接地。そのままさらに前に倒して、前側の補助脚も接地させることで、姿勢を安定させる。予期せぬ転倒を避けるために、むしろ積極的に転倒を利用するというのは、発想の転換で非常に面白い。シミュレーションなどでも、この方式の有用性が確認できているという。
-

予期せぬ転倒を避けるために安全に倒す。ユニークなアイデアだ (C)JAXA

着陸脚には、3Dプリンタで製造するポーラス金属を採用。着地の瞬間、これが潰れることで衝撃を吸収するというもので、小型軽量に作れるメリットもある。また、SLIMは頑丈な酸化剤・燃料一体型タンクを探査機の主構造として活用。その分のパネルを省略することで、大幅な軽量化を計ったという。
-

SLIMで採用された小型軽量化のための工夫 (C)JAXA/三菱電機

そして1つ注目したいのは、500N級のメインエンジンで、セラミックスラスタを採用していることだ。このセラミックスラスタは、金星探査機「あかつき」で初めて採用。従来の耐熱合金は、海外技術のコーティングが不可欠という大きな課題があったが、日本が得意とするセラミック技術により、国産化に成功していた。
金星周回軌道への投入失敗時、セラミックスラスタが破損したと考えられているものの、この原因はセラミックスラスタではなかった。逆止弁の閉塞により、高温の異常燃焼が引き起こされたことが原因であり、おそらく耐熱合金でも壊れていただろう。むしろ耐熱性に優れるセラミックスラスタでも壊れた、と見るべきだ。
坂井プロマネによれば、あかつきで使われたスラスタから設計で大きく変わったところは無いという。SLIMでの採用にあたり、メーカーの協力も得ながら、改めて検証を実施。その結果、「どう使えば安全か慎重に見極めて、こういう使い方なら大丈夫だろうと、確信を持てるようになった」とのことだ。
2台のユニークなローバーにも注目!
SLIMに搭載する小型ローバーは「LEV」(Lunar Excursion Vehicle)と呼ばれ、「LEV-1」と「LEV-2」の2台を用意。探査機と同様、ローバーも工学実証を目的としており、開発した自律移動技術を月面で試す。また搭載したカメラで探査機の着陸状況を撮影。SLIMミッションのデータを補強する役割も担う。
-

2台のローバーの搭載状態 (C)JAXA/東京農工大学/中央大学

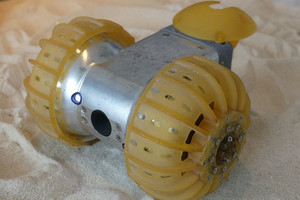
LEV-1は、中央大学、東京農工大学、和歌山大学などが開発に参加。2台の中ではLEV-1の方が大きく、サイズは26cm×40cm×30cm(搭載状態)、重さは2.1kgとなる。LEV-1の移動方法はジャンプだ。バネの力で地表を蹴り、月面では3mほど跳躍できるという。大きな傘のような車輪を回転させることで、跳躍する方向を変えることもできる。
LEV-1は小型ながら、地球と直接通信することが可能だ。UHF(コマンドとテレメトリ)とSバンド(画像)という2つの通信機を搭載。通信速度は最大1kbps程度しかないため、撮影した画像はローバーが自分で善し悪しを判断し、良い画像のみ送信することで、帯域を節約する。太陽電池も搭載しており、電力がある限り、活動を続ける予定だ。
-

LEV-1の特徴 (C)JAXA/東京農工大学/中央大学

一方、LEV-2はタカラトミー、ソニーグループ、同志社大学が開発に参加。ユニークなのは、直径約80mmのボールから、2輪型のローバーへ変形することだ。重量はわずか250gほど。手のひらサイズながら、「クロール走行」「バタフライ走行」という2つの走行モードにより、斜面での走行も可能だという。愛称は「SORA-Q」と名付けられた。
-

LEV-2の概要 (C)JAXA/タカラトミー

SORA-Qの紹介動画。変形や走行の様子も見ることができる
変形機能により、コンパクトに月面まで輸送できるメリットがある。タカラトミーはトランスフォーマーなど、変形する玩具を長年開発しており、そのノウハウを活用した。LEV-2については、すでに同型機がispaceの「HAKUTO-Rミッション1」に搭載されることが決まっており、同時期に2台が月面に向かうことになる。
-

月面で2輪ローバーに変形する (C)JAXA/タカラトミー/ソニー/同志社大学

さすがにLEV-2は小さすぎて地球と直接通信はできないものの、BluetoothによりLEV-1と接続。LEV-1に中継してもらい、地球との間でデータをやり取りする。電力は1次電池のみのため、活動時間は約2時間を想定している。
ローバーは2台とも、探査機の着陸直前に分離(高度は約1.8m)。どちらも自律的に移動し、お互いの位置は認識していないため、あまり離れすぎるとLEV-2が通信できなくなる恐れもあるものの、通信範囲から出るくらい移動できたのであれば、技術実証としては成功と言えるだろう。
-

ローバーは分離後、自律的に移動。探査機とは独立して活動する (C)JAXAなど

注目したいのは、探査機の着陸シーンを撮影できるかどうかだ。LEV-2は地表に降りて、展開してからの撮影となるため、タイミング的に難しい。しかしLEV-1は放出前に電源がオンになっているため、「明確に撮れるとは言えないがトライはしたい」(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授 大槻真嗣氏)とのことだ。
-

LEV-1の説明を担当した大槻真嗣氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授)
-

LEV-2の説明を担当した坂下哲也氏(JAXA宇宙探査イノベーションハブ 副ハブ長)


日本の月面着陸、結局どれが初になる?
ところで2022年度は、日本の月探査にとって、大きなマイルストーンになるかもしれない。JAXAや民間による月面探査が複数計画されており、まさに月面へのレースのような状況。どの探査機/ローバーが日本初になるのか、まだなんとも言えないが、最後に状況を簡単にまとめておこう。
- JAXA「SLIM」(着陸機)/JAXA等「LEV」(ローバー)
2022年度にH-IIAロケットで打ち上げ、着陸はその4~6カ月後になる見込み。相乗り先であるXRISMの開発遅れから打ち上げが延期されており、その進捗次第?
-

少ない推進剤で月に行ける軌道を採用したため、時間がかかる (C)JAXA

- ispace「HAKUTO-R」(着陸機)/JAXA等「変形型月面ロボット」(ローバー)
2022年末にFalcon 9ロケットで打ち上げ、着陸はその数カ月後になる見込み。こちらも打ち上げ時期が遅れ気味だが、JAXAより民間が先になるのか注目。
-

「HAKUTO-R」のイメージCG。ドバイのローバーも搭載する (C)ispace

- JAXA「OMOTENASHI」(着陸機)
2022年にSLSロケット初号機で打ち上げる予定。SLSはさすがに今年こそ上がりそうな雰囲気を出しているが、すでに何年も待たされており、点火するまで油断は禁物。
-

「OMOTENASHI」は世界最小サイズでの月面着陸を狙う (C)JAXA

- ダイモン「YAOKI」(ローバー)
2022年にVulcanロケット初号機で打ち上げる予定。こちらも打ち上げが遅れているので、Astroboticの着陸機やロケットの開発状況次第になりそう。
-

「YAOKI」も2輪型の超小型ローバー。頑丈な設計が大きな特徴だ