ドイツのマックスプラックインテリジェンスシステム研究所(Max Planck Institute for Intelligent Systems)、通称MPI-ISは、犬型ロボットを開発した。これは単なるロボットではない。生まれたばかりの4足歩行の動物が立ち上がり、歩行するまでのプロセスを人工ニューラルネットワークの技術を活用して、動物の脊髄の機能を犬型ロボットで模擬したというのだ。
この研究の意義は、生まれたばかりの動物がどのようにして立ち上がり、どのように歩くことを学ぶのかを調べるためだという。今回はそんな話題について触れたいと思う。
人工ニューラルネットワークを駆使した犬型ロボットとは?
MPI-ISは2022年7月18日、生まれたばかりの4足歩行の動物が立ち上がり歩行するまでのプロセスを人工ニューラルネットワークの技術を活用して、人工的な脊髄の機能を模擬した犬型ロボットを開発した。
-

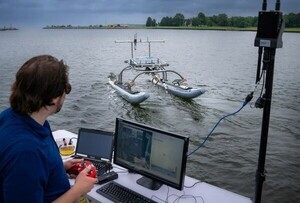
犬型ロボット「Morti」(出典:マックスプランク研究所)

この研究を行ったのは、博士課程の学生のFelix Ruppert氏とAlexander Badri-Sprowitz博士。彼らは、4足歩行の犬型ロボット「Morti」を開発した。
では、Mortiとはどのようなロボットなのだろうか。上述で、人工ニューラルネットワークの技術を活用、と申し上げたが、具体的には、ベイズ最適化アルゴリズムを活用しているという。
ベイズ最適化アルゴリズムとは、簡単にいうと不確かさを用いながら次に探索すべき点を決定するブラックボックス最適化アルゴリズムのこと。Mortiの足にあるセンサの情報を吸い上げ、ベイズ最適化アルゴリズムと照らし学習していく。このベイズ最適化アルゴリズムには、動物の脊髄を模擬した仮想脊髄がモデル化されている。
Mortiの仮想脊髄へ送信されるセンサ情報とコンピュータ内でプログラムとして動作する仮想脊髄のモデル化された目標データが照合され、送られたセンサ情報と期待されるセンサ情報を継続的に比較し、反射ループを実行し、運動制御パターンを適応させることによって、歩行を学習するという。
ちなみにベイズ最適化アルゴリズムには、CGP(Central Pattern Generator)を模擬している。CGPとは、中枢パターン生成器といい、動物の脊髄に局在しているニューロンであり、外部からのインプット情報がなくても運動出力パターンを形成する回路をいう。
-

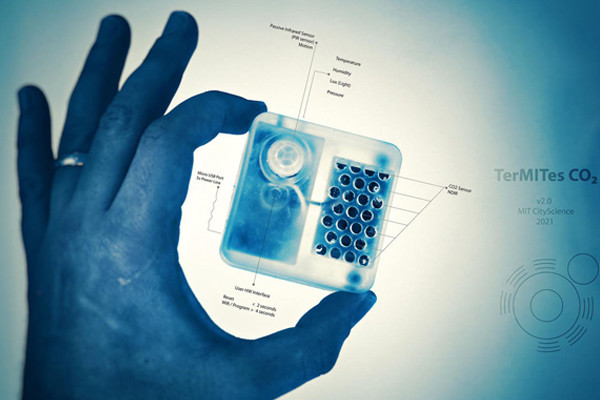
Mortiの構造。足にセンサがついており、送られたセンサ情報と期待されるセンサ情報を継続的に比較し、反射ループを実行し、運動制御パターンを適応させることによって、歩行を学習する(出典:マックスプランク研究所)

ちなみに、動物が生まれて立ち上がる際に、歩行する地面が平らな場合、隆起など凹凸がある場合でもCGPは最初は十分順応はできないが、徐々に時間をかけて順応していくのだという。
Mortiは、学習機能によって1時間程度で歩行できるようになったという。上述した地面が平らな場合でも凸凹がある場合でも人工ニューラルネットワークによって、足が前後に揺れる距離、足が揺れる速さ、および足が地面にある長さを調整しながら順応していったのだ。
またもう1つ驚くべきは、消費電力だ。犬型ロボット「Morti」はたった5W程度の電力しか消費していないという。普通の産業用の4足歩行ロボットであれば、5Wをはるかに超えた消費電力となるだろう。
いかがだっただろうか。今回、MPI-ISが開発した犬型ロボット「Morti」の人工ニューラルネットワークや仮想脊髄自体には、ロボットの足の設計、モーター、およびバネに関する明確な知識が備わってはいない。機械系の物理学についての知見もない。
しかしながら、人工ニューラルネットワークが学習し自律してMortiの歩行を成功させたのだ。このようにロボットの一般的な「モデル」がない状態でロボットを制御することができたのだ。
さらには、Mortiの開発および研究は、動物の脊髄を研究するに有効であることも示したのだ。研究チームを率いるAlexander Badri-Sprowitz博士は「CPGは多くの動物に存在する。しかし、どうすれば動物が反射とCPGを用いた運動を学習できるようになるのか? これは、ロボット工学と生物学の接点にある基礎研究で、ロボットモデルは、生物学だけでは答えられないような質問に対する答えを与えてくれる」としている。