自動運転に向け変化する自動車産業
「事故のないクルマ作り」が現在のクルマメーカーの掲げる共通のテーマだ。自動運転はそのための手段の1つにすぎない。この目標に向け、クルマメーカー(OEM)だけではなく、ティア1、ティア2サプライヤーも積極的に提案している。ティア2である半導体メーカーはすでにクルマというシステム作りにも参加しており、より安全なクルマ作りを支援している。カメラ、レーダー、LiDARすべてのセンサからさまざまなデータを解析、処理するための賢い半導体にフォーカスしているXilinxは、いま出番が来たと構えている。
2020年1月に開催された「第12回オートモーティブワールド(オートモーティブワールド2020)」で来日した、Xilinxのクルマ担当シニアディレクタ&グローバルリーダー、Willard Tu氏(図1)は、自動運転のための答えが決まっていない今、適応型シリコンこそがさまざまな変化に対応できるチップだと言い切る。CES 2020でMobileye社が12台のカメラだけで自動運転が可能なことを示し、注目を集めた。LiDARメーカーは戦々恐々としているのではないか、という記事もある。
-

図1 Xilinxのクルマ向けシニアディレクタ&グローバルリーダー、Willard Tu氏(右)。左はザイリンクス日本法人クルマ担当の友杉伸一朗氏

さらにECUの数を減らしまとめたドメインという単位のアーキテクチャへのトレンドも出てきている。いつまでもECUだけ増やす考えでは、ECUやそれらをつなぐワイヤーハーネスの増大などクルマの重量は増すばかりになってしまう。燃費改善にならずCO2排出が増加する。このため、ドメインアーキテクチャへの移行は避けられない。最近ではIntelやWind Riverなどもドメインアーキテクチャを後押しする。
FPGA+Armコアで柔軟性を提供
もともとFPGAメーカーであるXilinxは、FPGA一辺倒ではなく、CPUや周辺インタフェース回路など1チップに集積するZynqというSoCを提供してきた。このCPUはマルチコアも集積する。CPUはソフトウェアを書くことでカスタマイズするが、動作速度は一般にハードワイヤード回路と比べて遅い。FPGAは配線をプログラムで変えることによって専用の回路を設計できるという半導体である。
これらを1チップに集積すると、何が良くなるか。性能が遅くてもいろいろと変更したい場合にはCPU、速度を最優先したい専用回路が欲しいならFPGAで構成する。つまり使い分けができる。チップ全体が専用のハードウェア回路であれば最も高速になりうるが、変更はできない。大量生産で1つの機能を作る場合にはASICがベストだが、もはやそのような製品はなくなっている。XilinxはArmからCPUをライセンスで入手しており、FPGAも持っているため、フレキシブルに半導体ソリューションを提供できるという強みがある。
前述したMobileyeのようにカメラを12台も搭載し、画像を合成することによってLiDARが要らないというデモをCESで行ったようだが、残念ながら悪天候で視界不良の場合にはカメラは使えない。クルマメーカーはコストが安くても安全性は今や絶対的だ。安全性、信頼性が悪いものは採用されない。このため、カメラとレーダーとLiDARの組み合わせが標準になってくるだろう。それぞれの部品コストを下げることは必須である上に、コストを下げる試みは、例えば可動部を除去し量産に向いたLiDARなどはすでに出てきている。
-

図2 Xilinxが本邦初公開したハイエンド半導体チップ「Versal」。デモボード上では大きなファンが乗っている部分がそれである

となると、クルマはメーカーごと、あるいは車種ごとにADAS用のセンサはカメラの数、レーダー、LiDARの数が違ってくる。こういった少量多品種のクルマ市場に対抗できる半導体はやはり、FPGA搭載のマルチコアSoCに限られるだろう。
プログラム可能なAIエンジンハードウェア
Xilinxはさらにプログラム可能なAIエンジンと呼ぶ回路も開発している。人や物体の認識にはAIエンジン、制御とフレキシブルな演算にはCPU、性能を上げるにはマルチコアやbig.LITTLEアーキテクチャなども組み込める上に、専用回路用にFPGAで構成すれば、理想的な半導体チップができる。Xilinxは、ACAP(Adaptive Compute Acceleration Platform)と呼ぶCPU、FPGA、AIエンジンを搭載したハイエンド半導体「Versal」(図2)を昨年開発、今回のオートモーティブワールドで本邦初公開した。
自動運転に向けて、変更部分はこれだけではない。ドライバー監視機能や緊急ステアリング、V2X、幼児置き去り検出機能などさまざまな機能が追加されるロードマップが出来ている(図3)。しかも2020年から2023年にかけていろいろな変更も出てこよう。となると機能を支える半導体チップはフレキシブルに対応できるものがマストになる。
-

図3 欧州のNCAP仕様はロードマップ要件が変化し続ける (資料提供:Xilinx)

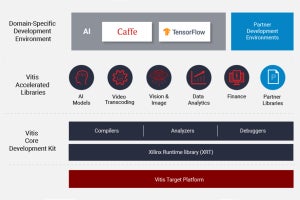
クルマの未来は、低速で人を運ぶロボタクシーから自動運転は始まり、人間の運転並みに高速運転ができるようになるためには、5Gのエッジ環境も欠かせない。加えて、これで終わり、という完成系のクルマはまず出てこない。改良に次ぐ改良がこの先も続いていく。こうなると、Xilinxの持つ、フレキシブルなハードウェアとソフトウェアはますます有利に働く。Xilinxもクルマに参入した企業という位置づけから、Xilinxでなければできないクルマ用半導体を作る会社という位置づけに変わってきた。Versalの次は統合ソフトウェア「Vitis」の充実だが、ハードウェアはどのようなフレキシブルな形になるのか、これからも楽しみだ。