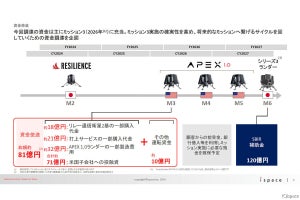
ispaceは4月12日、同社の欧州法人であるispace EUROPE S.A.(以下、ispace EU)が、2023年11月の発表では最速で2024年冬に打ち上げを予定している民間月面探査プログラム「HAKUTO-R」ミッション2において、月着陸船「RESILIENCEランダー」(RESILIENCEとは、「再起」や「復活」「回復」などの意味)で月に輸送して月面探査を行う予定の「マイクロローバー」(小型月面探査車)の認定モデルを使用した試験を完了し、重要な開発マイルストーンの1つを達成したと発表した。
-

2023年11月に発表された際のマイクロローバーのビジュアル(C)ispace(出所:ispace Webサイト)

また、今回の試験完了に合わせ、欧州宇宙機関(ESA) Human and Robotic Exploration部門のDaniel Neuenschwanderディレクターが、ispace EUオフィスにある組立施設を訪れ、マイクロローバーの開発進捗を視察したことも併せて発表された。
ミッション2で行う月面探査に向けた認定モデルの製造と環境試験の完了は、マイクロローバーの設計を検証し、同ローバーがロケット打ち上げ時の振動などの負荷に耐え、月面で活動することができるかどうかを実証するための重要な開発マイルストーンの1つとする。
-

月面に着陸したRESILIENCEランダーと、活動中のマイクロローバーのイメージ(C)ispace(出所:ispace Webサイト)

2023年11月に同ローバーのデザインが発表され、ispace EUではエンジニアリングモデルの開発がスタート。設計の妥当性が確認された後、認定モデルによる今回の試験が行われた。その試験結果を踏まえて、現在はフライトモデル(実際に宇宙に打ち上げるモデル)の開発が行われている。フライトモデルの開発と並行して、認定モデルはRESILIENCEランダーのフライトモデルに搭載され、ランダーと統合された状態での環境試験が行われる予定で、フライトモデルは開発完了後、2024年の夏ごろに日本へ輸送、RESILIENCEランダーへ搭載される予定だとする。
-

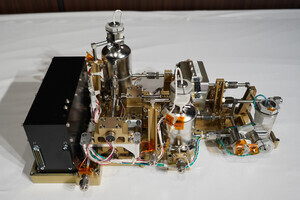
ミッション2で使用されるRESILIENCEランダーのフライトモデルの一部(2023年11月時点のもの)(C)ispace(出所:ispace Webサイト)

ミッション2では、マイクロローバーを使用して月のレゴリスの採取が行われる計画。そしてその所有権を、顧客であるNASAに譲渡する、NASAとの月資源商取引プログラムを実施し、アルテミス計画に貢献するという(2020年12月にispace EUはNASAとこの取り組みについての契約を締結済み)。
この取り組みを推進するため、HAKUTO-RのコーポレートパートナーであるEpiroc AB社が開発するスコップがマイクロローバーの後方に搭載される(2023年11月時点では前方に搭載することが発表されたが、後方へと変更された)。月面着陸後、スコップを使用して月のレゴリスを採取し、マイクロローバーの前後に搭載されたHDカメラ(2023年11月時点では前方のみの搭載だったが、後方にも追加されることになった)で採取物の撮影を行う計画だ。
-

ispace EUのエンジニアがマイクロローバーの環境試験の準備をしている様子(C)ispace(出所:ispace Webサイト)

マイクロローバーはルクセンブルク宇宙機関が管理し、欧州宇宙機関が実施するLuxIMPULSEプログラムの一環として、同宇宙機関との共同資金で開発を行っていくとしている。
ESAのNeuenschwanderディレクターは今回の発表に対し、「最先端の月面探査用マイクロローバーの開発を、ここ欧州中心の地で目の当たりにできることはルクセンブルクの産業が人類の創意工夫と国際協力の可能性に満ちていることを示していると思います。ESAはこの新たな技術が欧州の国際的な月探査の取り組みに加えられることを非常に楽しみにしています」とコメントしている。
-

ESAのNeuenschwanderディレクター(左)が、ispace EUオフィスを視察する様子。右はispace EUのLamamy CEO(C)ispace(出所:ispace Webサイト)

また、ispace EUのJulien-Alexandre Lamamy CEOは、「宇宙機の環境試験は、何か月にも及ぶ綿密な設計作業が究極の環境にさらされる、厳しい試練の場です。ルクセンブルクに世界トップクラスのメンバーが集まり、大きさや能力において非常に特徴的なローバーの設計、製造という素晴らしい役割を果たしました。ルクセンブルクと東京のチームが1つになった強力なシンボルとして、RESILIENCEランダーにマイクロローバーが搭載されることを楽しみにしています」と述べている。