



経済産業省傘下の新エネルギー・産業技術総合開発機構(NEDO)は2月20日、「ローカル5G通信環境を備え、既存の生産ラインを柔軟・迅速に組み換えられる、制御可能なダイナミック生産パイロットラインを、大手工作機械メーカーのDMG森精機の奈良商品開発センタ(奈良市)内に構築した」と発表した。
この“近未来系のダイナミック生産パイロットライン”は、NEDOのIoT推進部が2021年度から5年計画で推進している「5G等の活用による製造業のダイナミック・ケイパビリティ強化に向けた研究開発事業」の一環として、2022年度の助成事業として開発・構築されたもの。近未来の生産パイロットラインを実際に、DMG森精機とファナックが共同で具現化したことになる。
これによって、既存の生産ラインを、最先端の柔軟性に富んだ、故障に強い生産ラインに変身させる基本となる基盤技術を確立したといえる。日本の製造業の生産ラインでの柔軟な生産性を、一層強化できる柔軟な生産システム構築を目指した開発成果といえる。
今回は製造業の既存生産ラインで、その加工・生産ラインの一部装置が故障した場合でも、その時に組み立て生産などの加工などの仕事が入っていない生産ラインの一部を見つけ出し、自動的にその故障した加工・組み立てが本来担当するはずだった“仕事内容”を、ある部分の加工設備群が“代打”としてすぐに生産できる柔軟性に富んだ生産ラインに変身したことになる。この結果、生産ラインの一部が故障しても、本来の生産計画通りに生産することが可能になり、これによって、事前に精密に作成されたサプライチェーンの生産計画通りに納品することが可能になる。
今回、構築した既存の生産ラインを柔軟・迅速に組み換えられる、制御可能なダイナミック生産パイロットラインのモデルを、NEDOとDMG森精機は模式図(図1)によって説明する。
-
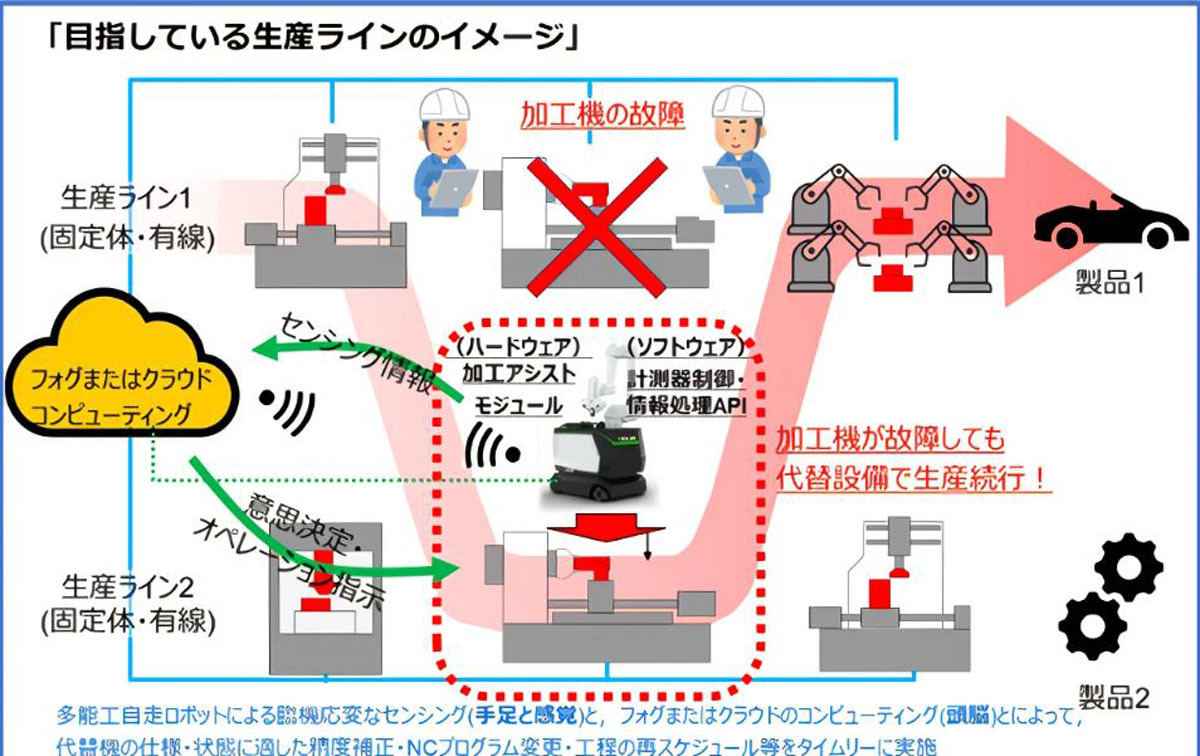
図1 既存の生産ラインを柔軟・迅速に組み換えられる、制御可能なダイナミック生産パイロットラインの模式図 (NEDO資料から引用)

この制御可能なダイナミック生産パイロットラインは、多能工自走ロボット、クラウド型無線協調制御プラットフォーム、NC(数値制御)連携システム、各加工アシストモジュールなどで構成されている。その制御可能なダイナミック生産パイロットラインのモデルの実際のライン部分の一部も公表している(図2)。
-
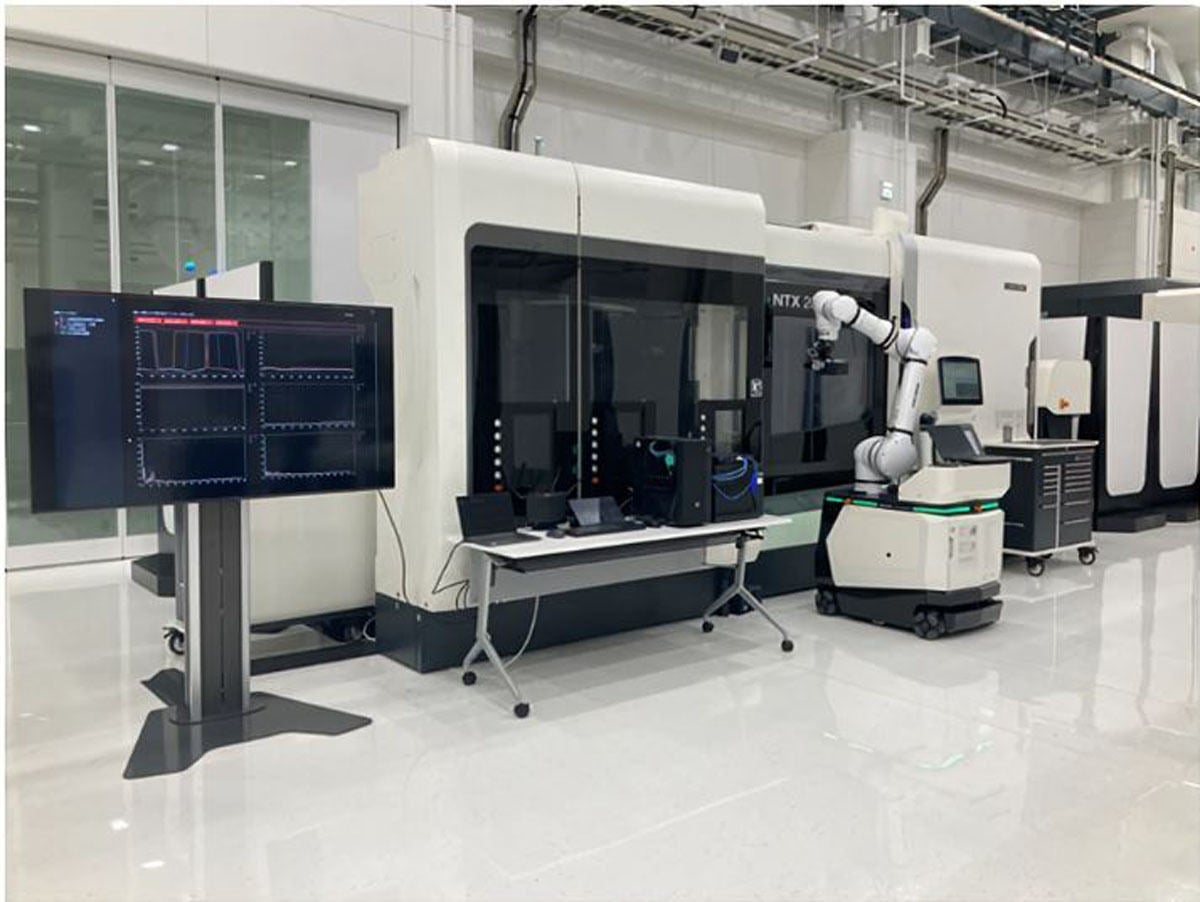
図2 今回、構築した制御可能なダイナミック生産パイロットラインの一部 (NEDO資料から引用)

図1の模式図では、多能工の自走ロボットなどで、何か不具合が生じると、臨機応変なセンシングによってその不具合状況を判断し、「クラウド(あるいはフォグ)コンピューティングの“頭脳”が代替工作機を見出して、その代替工作機のNC(数値制御)プログラミングをつくり替え、加工精度を保証しながら加工工程などをつくり替え、代替機能を迅速に再構築する仕組みだ」と説明する。
多能工自走ロボットでは、多能工自走ロボットが扱う加工工程の順序と動作経路計画に基づいて自律走行を行う。多能工自走ロボットのハンドに搭載した各種の計測機器から、無線によってネットワークストレージに当該データを蓄積する仕様になっている。
クラウド型無線協調制御プラットフォームでは、多能工自走ロボットにIoTゲートウェイを搭載し、高度な計算処理を実行するためのサーバーとWi-Fi6あるいはローカル5Gによる無線通信によってデータの送受信を実行する。
加工アシストモジュールは、3Dプリンターモジュール、ターニング加工モジュール、ワーク形状計測-加工パス生成モジュールなどで構成されている。
3Dプリンターモジュールは、温度情報などの機内測定、3Dスキャナーや超音波非破壊検査装置による詳細形状やクラック情報の取得などの各機能を提供する。実証では3Dプリンターで造形したワークの強度と積層条件についてデータ解析して、必要なデータ領域の特定を行い、さまざまな積層条件で造形し、取得したデータを回帰分析する。今回は「要求性能を満たす積層条件の算出に成功し、不良品の流出なしに、量産が行えることを確認した」という。
ターニング加工モジュールでは、ビジョンセンサーによる画像解析によって、機械学習を用いた切りくず堆積特定を行う。実証では「多能工自走ロボットのハンドに取り付けたビジョンセンサーによってNC旋盤の加工空間をモニタリングすることで切りくず堆積を検知し、ハンドやエアを用いて自動的に切りくずを除去し、作業の中断・停止なしで生産を継続できることを確認した」という。
ワーク形状計測-加工パス生成モジュールでは、3Dスキャナー装置によって被加工物のワークの走査を行い、加工パスを生成する。「実証では多能工自走ロボットのロボットアームを効率よく動かし、ハンドに搭載した3Dスキャナー装置で対象ワークの走査を短時間に完了し、加工パスを生成するという一連の手法を確認した」と説明する。
CAM(コンピューター支援生産)では、「ソフトウェアのパラメーター最適化を行い、複雑形状でもワーク(加工品)を固定する専用の治具なしでも造形品の仕上げ切削ができることを実現した」という。














