


軍事業界のトレンド・ワードの第2回目は「autonomous」。「autonomous」を辞書で調べると「自主的な」「自治権のある」といった意味が出てくるが、軍事分野では「自律的な」と訳すほうがしっくりくる。なお、「autonomy」という言葉が出てくることもあるが、本質的に意味するところは同じと考えてよい。
autonomousが求められる場面
では、どんな場面で autonomous かどうかが問題になるのか。
「それは当然でしょう」となるのが、各種無人ヴィークルの分野であることは論を待たない。無線あるいは有線で遠隔操縦する場合、話が違うが、人間が乗らず、かつ遠隔操縦も受けない場合は、ヴィークルが搭載しているコンピュータが、自力でなんとかしなければならない。すなわち、autonomousである。
無人機(UAV : Unmanned Aerial Vehicle)、無人車両(UGV : Unmanned Ground Vehicle)、無人船(USV : Unmanned Surface Vehicle)、無人潜水艇(UUV : Unmanned Underwater Vehicle)のいずれをとっても、「航法・操縦」の分野と、搭載するミッション機材の分野と、それぞれで自律性が求められる。
なお、ひらがなで書くと同じだが、「自立的」よりも「自律的」のほうがしっくりくる。なぜかというと、単に物理的に独立しているかどうかという話ではなくて、操縦や任務遂行のための指示を出す、制御・管制の機能が入ってくるからだ。
-

昨年に取材した、ゼネラル・アトミックス・エアロノーティカル・システムズ(GA-ASI)のシーガーディアンUAVも、遠隔操縦に加えて、自律飛行が可能

ちなみにUUVの場合、遠隔指令を受けないで自律的に動作するものを、わざわざAUV(Autonomous Underwater Vehicle)と呼んで区別しているのが面白い。昔から対機雷戦(MCM : Mine Countermeasures)の分野では、ケーブルで母船とつないで遠隔操作する無人水中艇(いわゆる機雷処分具)を多用していたためだろうか。
自律的な航法・操縦というと、真っ先にミサイルを連想する。中には、指令誘導といって外部から操縦指令を受けて飛ぶものもあるが、大抵のミサイルは、シーカーで捕捉した目標に向けて自律的に誘導する仕組みを備えている。
ミサイルの誘導は、目標の相対位置に基づいて行われる場合と、自身の絶対位置と目標の位置の2つの情報に基づいて行われる場合がある。それに対してヴィークルの航法・操縦は、後者になる。航法機器を用いて自らの現在位置(緯度・経度・高度)を把握した上で、目的地に向かうように操縦指令を出す。
地上や海上を移動する場合は、現在位置として緯度と経度の情報があれば事足りる。これは、慣性航法システム(INS : Inertial Navigation System)や、GPS(Global Positioning System)に代表されるGNSS(Global Navigation Satellite System)があれば用が足りる。飛びものは3次元の動きをするので、高度の情報も必要だが、これもINSやGNSSがあれば解決する。水中ではGNSSが使えないので、INSでなんとかするしかない。
-
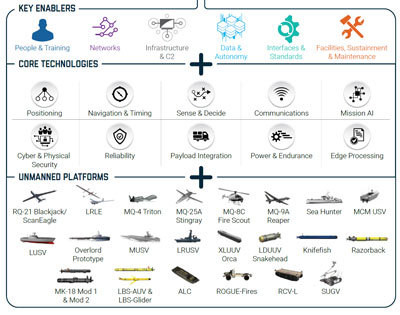
無人ヴィークルを実現・活用する際に関わる、実現のための要素と、そこで必要となる要素技術、具体的なプラットフォームに関するまとめ。「Autonomy」や「Mission AI」も含まれている 引用:米海軍の文書「UNMANNED Campaign Framework」

ミッション機材の自律化
それと比べると難しいのが、ミッション機材のほうかもしれない。
ミッション機材の制御とは何か。それは、例えば「センサーをどちらに指向して何を観測するか」であったり、「センサーが捕捉した対象が何者かを判断・識別する」であったり、「センサーが捕捉した対象が敵と判断できたら交戦する」であったりする。
これらは人間が行っている作業だが、それをコンピュータにどこまで任せられるかが問題になる。つまり、AIの軍事利用という話が出る度に持ち出される、「AIが制御する無人ロボット兵器が勝手に戦争をする事態への懸念」みたいな話と、どう折り合いをつけるのかという話である。
「レーダーが航空機を捕捉した、敵味方識別装置(IFF : Identification Friend or Foe)に反応はないから敵だ、撃て!」だけでは、判断が単純すぎる。もしかすると、相手のIFFトランスポンダーが故障していたり、設定したコードが間違っていたりするかもしれないからだ。
そこで、雑な判断をやってしまい、結果としてコンピュータが勝手に戦争を始めてしまったり、友軍相撃を引き起こしたりしたら悲劇だ。しかも、そんな事態が生じた時の責任の所在はどうなるのか、という問題もついて回る。
だから、ミッション機材の自律化といっても、交戦の判断のようなクリティカルなところは対象から外して人間に委ねるのが、いわゆる西側諸国における基本的な考え方となっている。ただし、その他の国が同じような考え方をしているかどうかは分からない。
それと比べると、センサー機器を作動させるだけの自律化なら、問題は少ない。例えば、「指定した海域の海底にあるかもしれない機雷を捜索してこい」という任務がそれ。機雷探知用のAUVを用意して、経由すべき地点をすべてインプットしてから解き放てばよい。
AUVは内蔵する航法システムを使い、現在位置と指示された経由地に基づいて自動的に針路を変えつつ走り回り、搭載するソナーで海底の状況を調べる。とってきたデータは内部のストレージ・デバイスに貯め込んでおいて、AUVを回収した後で取り出す。これぐらいなら自律的にやらせても問題はない。
武器の誘導制御も、人間が「撃つ」と判断した後の話になるから、これは自律的に行っても問題にならない。というか、すでに普通に行われていることだ。
著者プロフィール
井上孝司
鉄道・航空といった各種交通機関や軍事分野で、技術分野を中心とする著述活動を展開中のテクニカルライター。
マイクロソフト株式会社を経て1999年春に独立。『戦うコンピュータ(V)3』(潮書房光人社)のように情報通信技術を切口にする展開に加えて、さまざまな分野の記事を手掛ける。マイナビニュースに加えて『軍事研究』『丸』『Jwings』『航空ファン』『世界の艦船』『新幹線EX』などにも寄稿している。













