2014年度から開発が始まった、新型基幹ロケット「H3」。2020年度に試験機1号機が打ち上げられる予定で、現在活躍中のH-IIAロケットやH-IIBロケットの後継機となることが計画されている。
H3ロケットは宇宙航空研究開発機構(JAXA)と三菱重工業とが共同で開発を行っており、2015年度からはロケットの基本設計が始まっている。また7月2日には、それまでの「新型基幹ロケット」という呼び名に代わり、ついに「H3」という正式名称が与えられるなど、徐々にその姿が明らかになりつつある。
本連載では、H3の開発状況について、新しい情報などが発表され次第、その紹介や解説などを随時、お届けしていきたい。
今回は、第2段と、固体ロケット・ブースターについて見ていきたい。一見すると、H-IIAやH-IIBからあまり変わっていないようにも見えるが、その実は大きな進化を遂げる。

|

|
|
H3の想像図 (C)JAXA |
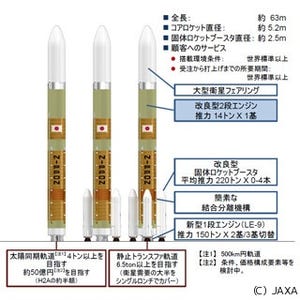
H3のシステム概要。今回はこのうち、ロケットの第2段と固体ロケット・ブースターについて見ていきたい (C)JAXA |
第2段にはH-IIAのエンジンを改良、新型エンジンはおあずけ
H3の第2段には、H-IIAやH-IIBで使われているLE-5B-2を改良したエンジンが使われる。
以前の検討では、第1段に新しく開発したロケット・エンジン「LE-9」を使うのと同様に、第2段には「LE-11」という新しいロケット・エンジンを使うことが計画されていた。LE-11はLE-9、またLE-5B-2と同様に、エキスパンダー・ブリード・サイクルを使うエンジンで、LE-5B-2よりさらに高性能なエンジンになる予定だった。しかし最終的には、LE-5B-2を改良したエンジンが使われることになった。
岡田プロマネは「LE-11はパワフルなエンジンとして計画していました。しかし、我々にとって大事なのは『2020年にH3を実現させる』ということ。これまで日本では、新型の第1段エンジン(LE-9)と第2段エンジンを同時に開発するということはやったことがありません。そのチャレンジをしても良いのかと考え、今回は確実に開発できる『LE-5Bを改良する』という方法を選びました」と語った。
LE-5B-2をH3で使うにあたっての改良点は、エンジンの寿命を延ばす「長寿命化」にある。H3ではH-IIAよりも第2段機体が大きくなっており、その分タンクには多くの推進剤が入っていることから、H-IIAよりも長い時間、ロケット・エンジンを動かす必要があるためである。

|
|
H-IIAやH-IIBの第2段で使われているLE-5Bエンジン (C)MHI |
H-IIAの高度化の技術も継承
また、現在開発中のH-IIAの第2段の「高度化」で培われる技術も受け継がれる。高度化とは、打ち上げ能力を向上させたり、振動や衝撃を小さくし、衛星への負担を低減したり、地上のレーダー局に頼らずに飛行できるようにし、地上インフラ設備を少なくしたりといった改良のことだ。
詳しくは今後別の記事で触れるとして、このうち打ち上げ能力を向上させる改良について、軽く触れたい。
たとえば、通信衛星のような静止衛星を打ち上げるときのことを考えると、現在のH-IIAの打ち上げ能力は世界標準からやや劣っている状態にある。
多くの場合、静止軌道を積んだロケットは、最終的に静止衛星が運用される静止軌道の一歩手前の「静止トランスファー軌道」に衛星を投入する。一方、静止軌道は近地点高度(軌道の中で地表に最も近い点)と遠地点高度(軌道の中で地表から最も遠い点)が共に3万5800km、軌道傾斜角(赤道からの傾き)が0度のところにある。つまり静止トランスファー軌道から静止軌道へは、衛星側が持つエンジンを使って乗り移る必要がある。
H-IIAは最大で6トンの静止衛星を静止トランスファー軌道に投入することができる。この数値自体は決して悪いわけではない。
しかし、H-IIAの「静止トランスファー軌道に6トン」という打ち上げ能力は、厳密には“近地点高度が250km、軌道傾斜角が28.5度の”静止トランスファー軌道に6トン、という前提条件が付く。ここから衛星がエンジンを噴射し、静止軌道に乗 り移るためには、秒速1830mほどの増速量が必要となる。
ところが、商業衛星の打ち上げ市場の中で一番のシェアを握る欧州の「アリアン5 ECA」ロケットは、この増速量が秒速1500mほどで済んでしまうのだ。アリアン5の発射場はほぼ赤道直下にあることから、軌道傾斜角が静止軌道と同じ、ほぼ0度の静止トランスファー軌道へ打ち上げることができ、その結果、衛星側はほとんど高度を合わせるだけで済んでしまうためである。
この格差を改善するために開発が始まったのが、H-IIAの高度化である。主にH-IIAの第2段を改良し、より長時間飛行できるようにし、そしてLE-5B-2を再々着火、つまり合計で3回、点火と停止を繰り返すことができるようにする。これに より、これまでは衛星側が負担せざるを得なかった増速量の一部を肩代わりできるようになる。
その代償として、静止トランスファー軌道への打ち上げ能力は最大4.6トンまで落ちることにはなるが、アリアン5などとほぼ同等の条件の静止トランスファー軌道に、衛星を打ち上げることが可能となる。これにより、たとえばアリアン5 で打ち上げることを想定して造られた衛星を、H-IIAで打ち上げることができるようになり、衛星の運用者にとって選択肢に入りやすくなるなど、H-IIAの国際競争力が強化される。
実は、もともとLE-5BやLE-5B-2は、それが可能なだけの性能を持っていた。しかし、タンクや配管、バッテリーなど、機体側の制約によって、その能力のすべてを発揮することができず、これまでは宝の持ち腐れ状態となっていた。
高度化の開発は2011年度から行われており、これまでに地上での試験だけではなく、実際の打ち上げの中でも試験や実証が行われている。たとえば2014年の小惑星探査機「はやぶさ2」の打ち上げでは、その技術の一部が先行的に使われている。高度化された第2段が本格的に投入されるのは、今年の秋ごろに打ち上げが予定されている、H-IIAロケット29号機からとなる。
これらの開発で培われた技術はH3にも投じられることになっており、つまりH3もまた、世界標準とほぼ同じ条件で衛星を打ち上げられるということになる。

|

|
|
高度化での改良点。今回触れた第2段の運用時間の拡大以外にも、多くの点が改良される (C)JAXA |
高度化された第2段の想像図 (C)JAXA |
振動環境も低減
また「三菱重工技報 Vol.51 No.4 (2014)」によると、エンジンとタンクとの結合部も改良されるという。これにより、ロケットの振動が積み荷である人工衛星に与える影響の度合いが少なくなるとされる。
振動環境については、現行のH-IIAやH-IIBで問題となり、対策が必要となったという経緯がある。そこでH3では、設計初期からエンジン取付部の剛性に配慮した設計を採ることにしたという。これにより、ロケット飛行中の衛星への負荷を低減し、また衛星の開発試験の負担も低減される。
JAXAによると、振動も含めた衛星への搭載環境条件は、世界標準以上を目指すとしている。これが実現できれば「乗り心地の良いロケット」としてアピールできるようになるだろう。
もっとも、世界各国の次世代ロケットでもこの辺りは対応することが予想されるため、「H3ならでは」の強みにはならないかもしれない。

|
|
エンジン取付構造(案)の一例 (C)MHI |
固体ロケット・ブースターも大きく改良
H3の両脇に装着されている固体ロケット・ブースターは、H-IIAと同様に、打ち上げに合わせて装着数を2基と4基で選択することができる。またH3は、第1段のLE-9だけでも離昇が可能なので、0本、つまり装着しないということもできる。
H3の固体ロケット・ブースターは、H-IIAやH-IIBで使われているもの(SRB-A)とほぼ同じ大きさだが、大きく改良が加えられることになる。
一番大きな改良点は、ロケットのコア機体との結合方法を簡素にすることである。H-IIAを見ると、コア機体とSRB-Aとは何本かの白い棒のような部品で結合されている。横向きに付いているものをヨー・ブレス、斜めに付いているものをスラスト・ストラットと呼び、ヨー・ブレスはヨー方向、つまり横方向への動きを伝達し、スラスト・ストラットはロケットを持ち上げる力を伝達する役割を持っている。
ただ、世界の他のロケットを見てみても、こうした棒状の部品を用いて結合されているロケットはない。また、H-IIAの先代にあたるH-IIロケットにもない。
なぜ、H-IIAやH-IIBでこうした結合方法が使われているのかといえば、SRB-Aのモーター・ケースに、炭素繊維強化プラスチック(CFRP)が使われていることにある。炭素繊維強化プラスチックは高い強度と軽さを併せ持つ材料だが、どこか一点に力が集中することに弱い。たとえばボルトを使って第1段機体と直接結合すると、その部分に力が集中し、壊れてしまう可能性があるのだ。
そこで、ブースターの前後にアルミ合金製のアダプターを取り付け、そこにヨー・ブレスやスラスト・ストラットを接続するという方式が採られた。アルミ合金製は結合部にかかる力を十分に受け止めることができるだけの強度を持ち、また一部分にだけ使うことで、他の大部分はCFRP製のままにできるため、軽量化も図れる。
だが、H3ではさらなる軽量化のために、CFRP製のモーター・ケースはそのままに、ヨー・ブレスやスラスト・ストラットもなくし、コア機体と直接結合する方法となった。
また、ノズルの可動機構もなくなることになった。SRB-Aには推力偏向機構(TVC)が装備されており、ノズルの方向を動かすことで、ロケットのピッチ(縦)方向とヨー方向の制御を行っていた。H3のブースターではこれをなくし、コア機体の第1段にあるLE-9エンジンのみで飛行方向を制御するという。
また、SRB-Aのモーター・ケースは、米国のオービタルATK社にライセンス料を支払って製造しているが、H3では国産化される。
さらに、推力のパターンを見直したり、振動を少なくしたりといった改良も加えられ、軽量化と低コスト化、信頼性や性能の向上などが一挙に図られることになる。

|

|
|
SRB-Aが取り付けられる様子。想像図では細い棒のように見えるスラスト・ストラットも、実は電柱ぐらいの大きさがある (C)JAXA |
SRB-A分離の概念図。H3ではこの鉄棒運動のようなギミックが見られなくなる (C)JAXA |
次回は、ロケットの製造や組み立ての工程や、打ち上げが行われる種子島宇宙センターの改良点について見ていきたい。
(続く)
参考
・http://fanfun.jaxa.jp/jaxatv/files/jaxatv_20150708_h3.pdf
・http://www.mhi.co.jp/technology/review/pdf/484/484040.pdf
・http://www.mhi.co.jp/technology/review/pdf/514/514053.pdf
・http://www.mhi.co.jp/technology/review/pdf/514/514038.pdf
・http://global.jaxa.jp/activity/pr/brochure/files/rocket08.pdf