大阪大学(阪大)は12月7日、小型ドローンに搭載されるミリ波帯超広帯域レーダーの小型軽量化と高速化を実現し、同レーダーを用いて、建造物外壁の内部欠陥(タイルとモルタル層の間の空隙やコンクリート躯体とモルタル層の間の空隙など)を、非接触で直接可視化することに成功したことを発表した。
同成果は、阪大大学院 基礎工学研究科の永妻忠夫教授、同・易利助教、同・小藪庸介大学院生、同・王雅珩大学院生(研究当時)、JFE商事エレクトロニクス、東京電力ホールディングス、清水建設の共同研究チームによるもの。詳細は、12月5~8日に台湾で開催された国際会議「アジア・パシフィックマイクロ波会議(APMC2023)」において発表された。
タイルなどで覆われた外壁内部の欠陥(空隙など)があると、タイルを含む外壁の剥落、落下の危険性が高まってしまうため外壁調査によって安全性の確認が行われている。その主な手法としては従来は人の手による打音検査や赤外線調査などであったが近年、ドローンに高精細カメラや赤外線カメラなどを搭載し、構造物の点検や診断を行うケースも増えてきたという。
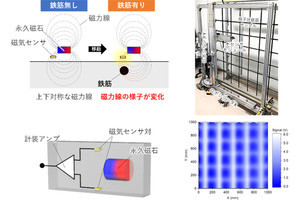
しかし、構造物の表面を観察する場合は可視光や赤外線(レーザ光も含む)でできるが、物体の内部を調べるためには物質透過能力を有するマイクロ波やミリ波などの周波数を用いる必要があり、そうした取り組みの中でも光通信技術を活用したレーダーシステムの開発を行ってきたのが研究チームだという。研究チームが考案したシステムでは、まず光通信波長(1.55μm)帯において、2つの異なる波長の光信号を発生させ、これを光ファイバーで伝送し、光信号を電気信号に変換する光電変換器に与えることにより、2つの光信号の波長差に対応した周波数の電波を発生させるという。光波長を精密にコントロールすることで、およそ4GHzから40GHzの範囲で任意の帯域の電波を作ることが可能だという。
この電波の周波数を変えながら対象物に照射し、そこから反射して戻ってきた電波と元の電波との振幅位相関係を計算することにより、外壁内部の欠陥の位置を知ることができる。今回の研究では、4GHzから40GHzの周波数範囲を高速に変化させる技術を開発し、1ミリ秒でレーダーを照射したポイントの欠陥の情報を得られるシステムを開発したという。
実際のシステムとしてドローンに搭載される部分は、光電変換器、レーダー回路、ならびにアンテナ(送受信で共有)のみで、ドローンのペイロードの軽量化に成功したとする。光信号の発生や信号処理を行うための制御機器は地上に置かれ、ドローンとは、軽量の光ファイバケーブルと低周波電気信号ケーブルで接続。すでに先行して開発されていた1号機は、プロペラを除くサイズが全長810mm×全幅670mm×全高430mm、重量6.3kg、ペイロード2.7kgという大型ドローンに搭載されていたが、今回開発されたシステムは軽量化された結果、全長290mm×全幅290mm×全高196mm、重量1.45kg、ペイロード500gの小型ドローンに搭載することが可能になったとする。
-
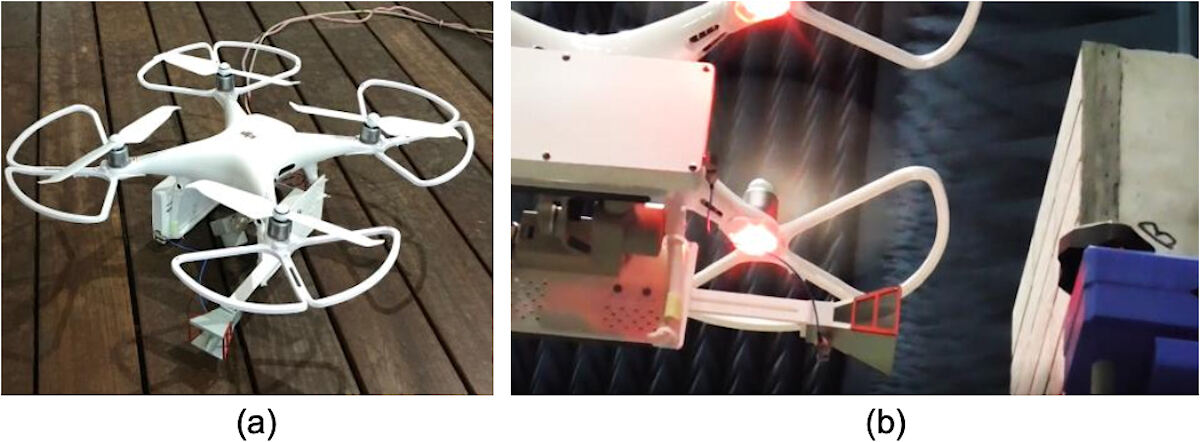
(a)小型ドローンに搭載されたミリ波レーダの外観。(b)外壁試験体に近接させて測定が行われている様子 (出所:阪大Webサイト)

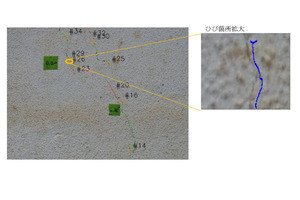
また、開発されたシステムの有用性を実証することを目的に、建造物外壁の内部欠陥を模擬した試験体での実験が行われたところ、ドローン上のアンテナを、試験体表面から約15cmの距離に保ち、アンテナを水平方向に走査したところ断面画像を得ることに成功。空隙の可視化に成功したことが確かめられたとするほか、0.5mm幅の空隙や、モルタルとコンクリート躯体とモルタル層の間の空隙についても検出が可能であることも確認できたという。
-

開発されたドローン搭載型ミリ波レーダーシステム。(a)外観。(b)システム構成のブロック図。地上に設置された制御システムにおいて、光通信技術を活用して光信号が光ファイバケーブルでドローンまで伝送され、ドローン上でミリ波信号に変換される。ミリ波信号はレーダー回路に供給され、同回路で検出された信号は、電気ケーブルで地上の信号処理システムに送られる仕組み (出所:阪大Webサイト)

さらに、測定時間も1号機では測定箇所1点あたり数秒かかっていたが、今回は約1ミリ秒で欠陥情報を得ることができたことを確認。一般にドローンは、空中で静止中でも微小に揺らいでいるが、1ミリ秒という短時間測定であれば、この揺らぎも十分短いため、より精密な測定が可能になるという。
-

測定結果の例。(a)試験体の断面図。タイルとモルタルとの間に1mmの空隙が作られており、タイルの剥離の原因となる欠陥が模擬されている。 (b)ドローン搭載レーダにより欠陥が可視化された例 (出所:阪大Webサイト)

なお、研究チームでは今後、ミリ波レーダーを搭載したドローンやロボットを建造物に対して2次元平面で広域走査するための技術開発を進め、さまざまな構造物やインフラ設備の診断への実利用を進めていくとしている。