大阪大学(阪大)は12月13日、磁気の力を応用したセンサによりコンクリートに埋設された鉄筋の様子を透視することに成功したと発表した。
同成果は、阪大 産業科学研究所(産研)の千葉大地教授らの研究チームによるもの。詳細は、12月14日・15日に大阪市で開催されている展示会・シンポジウム「イノベーションストリーム KANSAI 2021」において発表された。
コンクリートに埋設された鉄筋を探査することを目的に、電磁波レーダー法、電磁誘導法、X線レントゲン法などさまざまな手法が考案されているが、それぞれに長所、短所があることが知られている。千葉教授らは2020年に、永久磁石と磁気センサの組み合わせからなるセンサモジュールを用いることで、シンプルかつ安価で実現できる「永久磁石法」を発表していた。同手法は、非磁性金属などを感知しないため、鉄筋のみを狙って検出することができるほか、電磁誘導法に比べ、より深いところに埋設された鉄筋の観測ができ、コンクリートの湿潤状況や空洞の有無などに左右されないという長所がある。
今回の実験では、永久磁石法のセンサモジュールを2次元スキャンロボットに搭載する形で、格子状鉄筋の配筋状況の可視化を試みることにしたという。
-
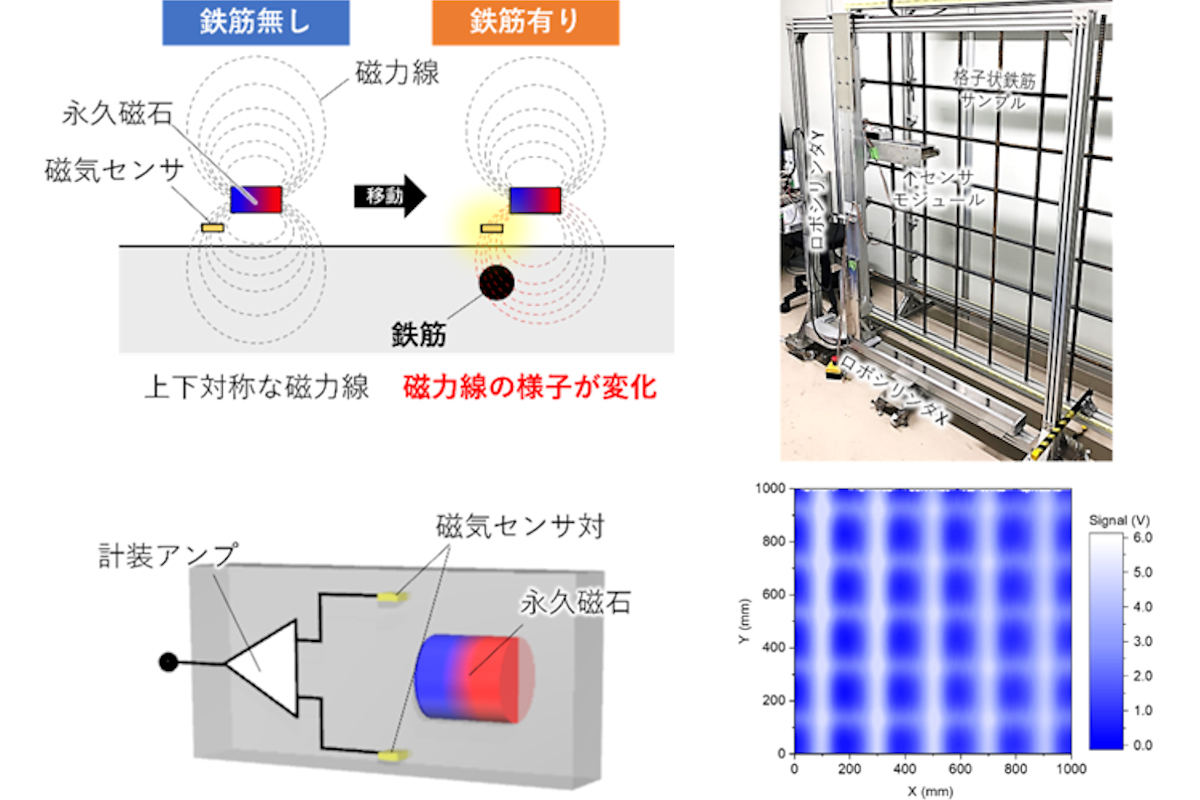
(左)上段は永久磁石法の概要。下段はセンサモジュールの構造概要。(右)上段は永久磁石法を用いたセンサを搭載した2次元スキャンロボット。1.5m角の大きさがある。(右)格子状鉄筋サンプルの計測結果 (出所:阪大 産研Webサイト)

具体的には、理想的な格子状鉄筋サンプルを用意し、実験室内での試験を重ね、さまざまな太さの鉄筋や仮想的なかぶり深さ、配筋状況における計測結果のデータ蓄積を行ったのち、実際に屋外の建屋外壁を用いた測定を行ったという。
その結果、コンクリートに埋設された鉄筋の様子を透視できていることが確認された。また、永久磁石法では鉄筋とセンサモジュールとの距離によってシグナル強度が敏感に変化するが、今回の試験では偶然の産物ながら、ロボットに若干の傾きが生じており、その距離の差が取得した画像にも反映されていることが確認されたとのことで、得られた感度であれば、鉄筋のかぶり深さや太さの情報も明らかにできるものと期待されるとしている。
また、取得画像では3か所にスポット状の強いシグナルも観測。壁面垂直方向に埋設された鋼材によるものと考えられるとしている。
-
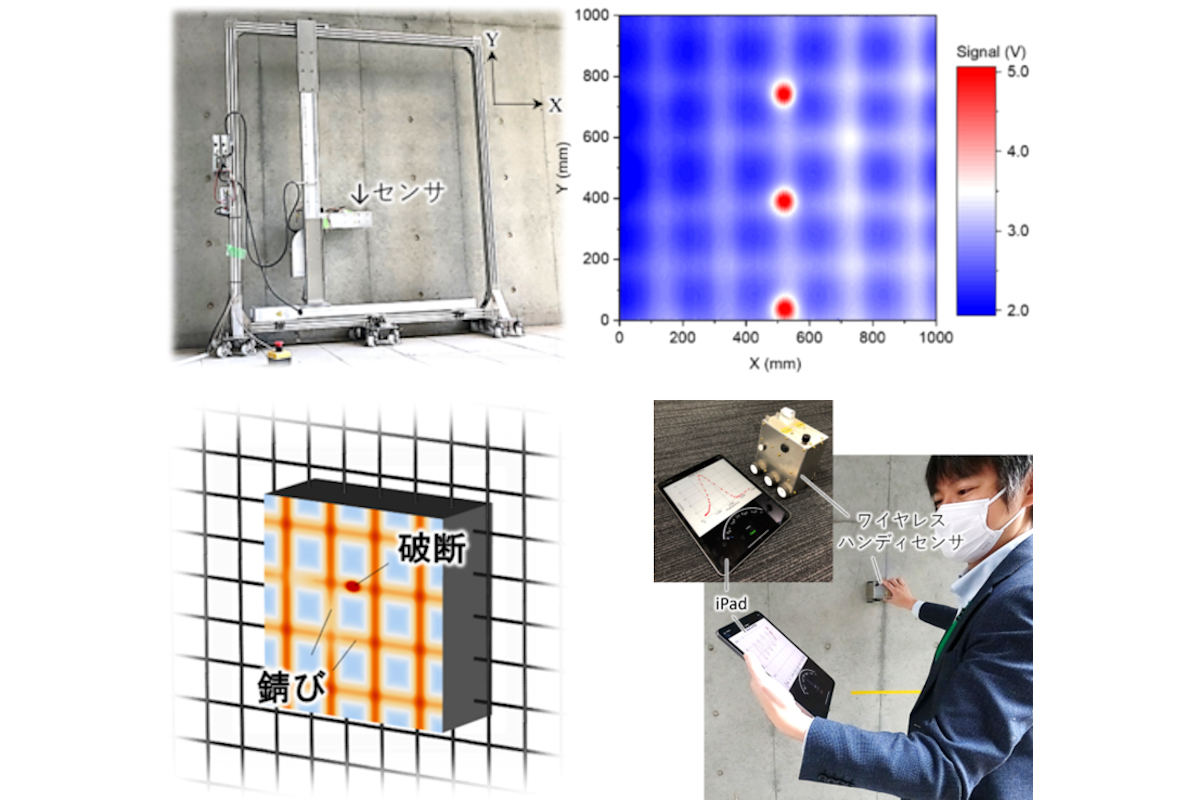
(左上)コンクリート外壁前に設置された2次元スキャンロボット。このときの設置ではわずかに傾きがあり、左上が右下に比べて数mmほど壁面から離れていたという。(右上)コンクリート外壁の検査結果。数mmの距離の差が反映されており、右下に比べて左上の鉄筋が薄く写っているのがわかる。(左下)破断や錆びなどの観測イメージ。(右下)現在、開発が進められているワイヤレスハンディセンサによる簡易計測の様子 (出所:阪大 産研Webサイト)

今回の成果について研究チームでは、感度の高さから、破断箇所には強いシグナルが検出され、錆びた箇所では鉄筋が周囲より細くなるためにシグナルが弱くなるなど、不健全箇所では、健全箇所とは異なるシグナルが検出されると予想されるとしており、老朽化した建屋の検査や施工確認などをより安価にスピーディに行えるようになることが期待されるとする。
なお、今回用いられた2次元スキャンロボットは1.5m角ほどの大きさであるため、より簡易に計測したいというニーズへの対応に向け、タブレットやスマートフォンなどとワイヤレス接続可能な小型ハンディセンサの開発も進めており、すでにプロトタイプの試作が完了しており、今後軽量化を進め、使い勝手の向上を図っていきたいとしている。