パナソニックアドバンストテクノロジー(PAD)と大成建設は5月16日、国土交通省(国交省)が実施する「宇宙無人建設革新技術開発推進事業」における「宇宙建設革新プロジェクト」として採択された「月面適応のためのSLAM自動運転技術の開発」に関する研究開発を「F/S(フィージビリティ・スタディ)」から「R&D Stage」にステップアップして継続実施することを発表した。
国交省では、これまで培われてきた無人建設技術(自動化、遠隔化、ICT施工など)について、近年、激甚化する災害対応・国土強靱化に加え、人口減少下において、さらなる高度化と現場への普及は喫緊の課題と捉えているという。
また、宇宙利用探査において世界に先駆けて月面拠点建設を進めるためにも、遠隔あるいは自動の建設技術(無人化施工など)は重要な要素となると位置づけられており、アルテミス計画などを通じて月面環境に関するノウハウを有する文部科学省と連携して、月面拠点建設へ適用するための技術開発を進めると同時に、地上の事業へ波及させる計画とする。
GPSなどの測位衛星から位置情報を取得できない月面環境で建設機械の自動運転を実現するためには、別の手段で建設機械の位置情報を正確に把握する必要があり、PADでは、これまで「LiDAR-SLAM」技術による建設機械の自己位置推定技術の開発を実証を行ってきており、測位衛星が利用できない地上不整地環境での建設機械の自律移動を実現してきたという。
LiDAR-SLAM技術は、LiDARの計測値をメイン情報として使用し、自己位置推定と環境地図作成を同時に行うSLAM技術のことで、レーザーセンサは暗所でも使用可能で、遠距離でも距離精度が高く、車両の速度が速い場合でも正確な地図を構築できるメリットを有する。一方、計測値である周囲地形の3D点群データの密度が粗いため、周囲に立体物が少ない環境では、点群データによる位置合わせが困難になるデメリットもあった。
そこで今回の研究開発では、LiDAR-SLAM技術に、人工的な特徴点を活用する「ランドマークSLAM」技術と、カメラから得られるさまざまな情報を統合することで、月面のような特殊な環境にも適応可能な自動運転技術の構築を目指すとする。
ランドマークSLAM技術は、あらかじめ配置した周辺環境と区別しやすいランドマークを基準として自己位置推定と環境地図作成を同時に行うSLAM技術のことで、今回の研究開発では、立体物が少ない環境において、あらかじめ設置したマーカを目印とする手法を適応する予定だという。
また、月面を想定した自動運転技術の研究開発においては、月面を仮想環境で再現したシミュレーション評価が重要な要素となるともしており、PADでは、これまでの車載開発を通じて得たモデルベース開発・シミュレーション開発のノウハウがあることから、今回の研究開発でも、NASAなどより公開されているデータを基に、月面の仮想環境モデルを構築し、同環境上でのセンシング技術の開発や自動運転技術の評価、精度向上を継続していくとする。
-
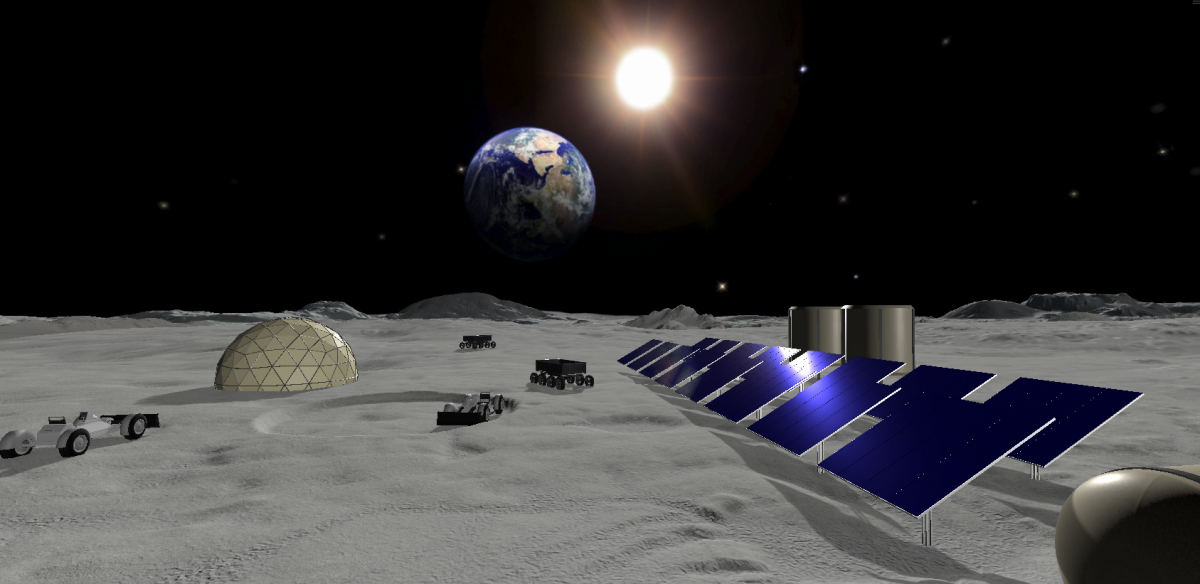
月面施工シミュレータ画面

-

地上施工シミュレータ画面

なお、今後はそうしたシミュレーション評価に加え、月面を模した疑似環境での実証実験も行うことで、開発技術を現実空間に適応するための課題対応を実施して行く計画としているほか、PADでは建設機械をはじめとするさまざまな自律移動モビリティの自動運転を実現するための技術の確立に向けた研究開発も推進していくとしている。
-
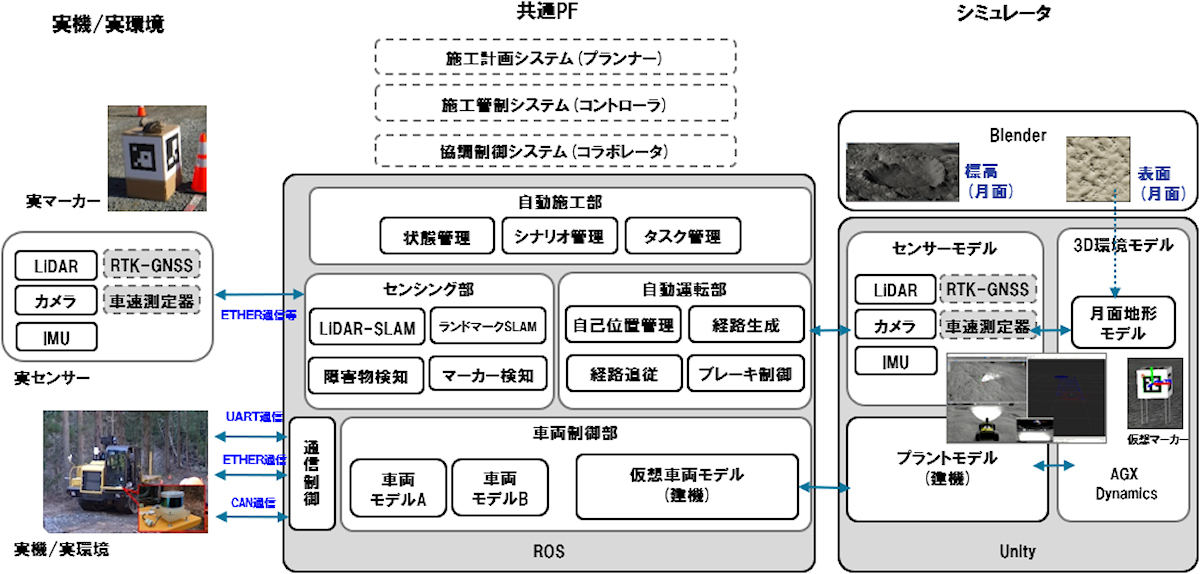
システム構成ブロック図