今年も東京・品川で「Arm Tech Symposia」が開催された。例年に比べると今年は充実度が増した感があり、久しぶりにSynopsys/CadenceによるSoC設計のコースやFunctional Safetyに向けたSTL(Software Test Library)の使い方といった、かなり突っ込んだ内容のセッションも用意されていた。
また閉会後、即時資料がダウンロード可能になるといった対応も従来には見られないもので、どうして急にこんなに充実してしまったのか? と正直驚いている。
午後のセッションは6トラック同時進行とあって、「この時間重なっててどっちかしか選べない!」なんて思いをした受講者も少なくなかったのでは? と思う。中でも自動運転に向けてのSwift Navigationによる「High Precision Localization」というセッションは、本国から同社のJoel Gibson氏(EVP of Automotive, Leadership Team, Swift Navigation)を招いての講演となるなど、旬の話題に向けて随分頑張ったという気がする。今年参加できなかった方は、来年に期待されたい。
Armの快進撃を支える3本柱
さてそんなArm Tech Symposiaであるが、Armによる基調講演そのものは、ほとんどすでに先般開催のArm TechConで発表済とあって新情報らしいものはあまり無かった。ただ、いくつか興味深いトピックがあったので、ご紹介したい(Photo01)。
-

Photo01:基調講演はおなじみIan Smythe氏。ちなみにこれは基調講演後の、記者説明会でのスナップ

Smythe氏の基調講演は、基本的にはTechConで同氏が行った講演そのままであった。まずCompute Performance/Security/Software and Toolsという3本柱がArmを支えているとして、個々の要素を説明。その後はまずクライアント向けではMiddle Range向けに「Mali-G57」や「Mali-D37」、そして「Ethos-N57/N37」を紹介、Server向けではNeoverseに絡んで「Project Cassini」を説明し、最後に追加で自動車向けの取り組みについての説明をして終わるという日本市場向けの内容となっていた。
この中で、まずNeoverseの成果として、つい先日発表されたAWS Graviton2への言及があった。もっともArmがGraviton2の詳細を説明出来る訳もないため、あくまでもAWSの発表をそのままなぞっただけである。初代のGravitonは以前にも触れたがCosmos PlatformベースでCortex-A72×16という構成である。これがGraviton2では「Build with Arm Neoverse cores with AWS-designed silicon using 7nm manufacturing technology」という表現からして、アーキテクチャライセンスを取得して独自コア…という訳ではなく、恐らくはNeoverse N1コアを搭載したAres Platformベースのものになったと考えられる。
-
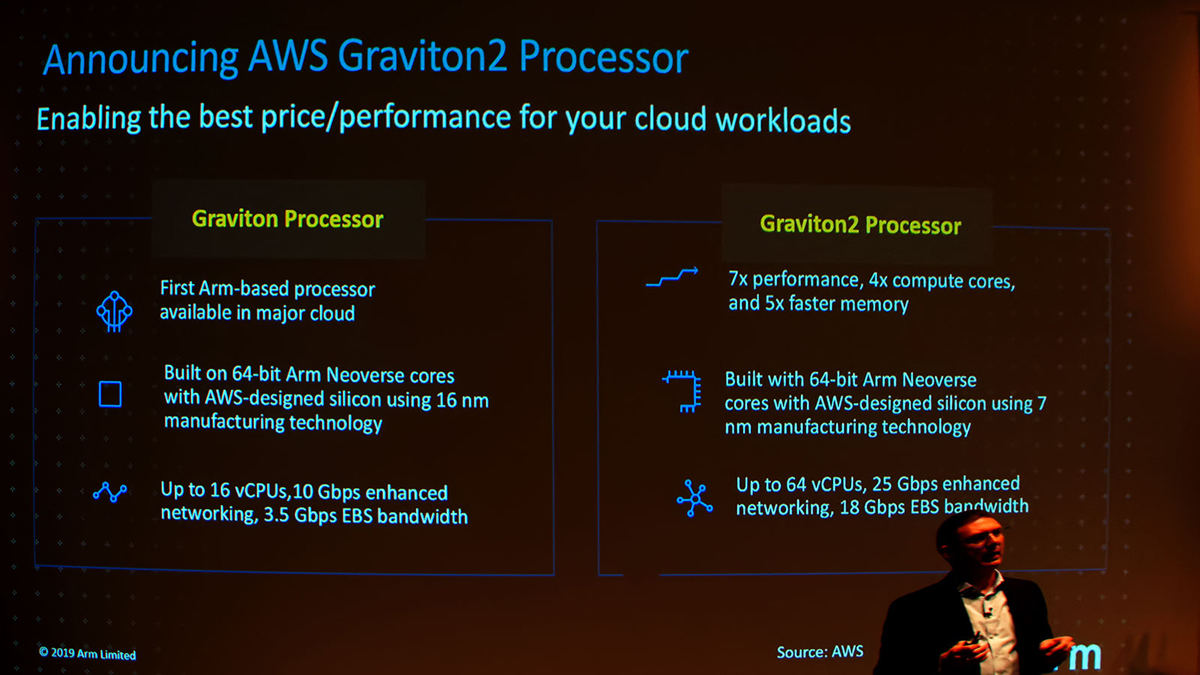
Photo02:Graviton2に関するスライドはこの1枚のみで終わった

Ares Platformで使われるCMN-600は最大128コアまでのCPUをカバーできるが、さすがに128コアをフルに利用するとなると、足回り(メモリコントローラやキャッシュ類)を相当充実させないと厳しい。64コアで制限したのは多分こうしたバランスを考えての事と思われる。
初代、つまりCortex-A72ベースのGravitonと比較してコア数4倍、性能7倍、メモリ帯域5倍とされているが、Neoverse N1のベースであるCortex-A76は、Cortex-A73比で1.9~2.1倍の性能とされている。
Cortex-A73はCortex-A72比で最大30%の性能アップとなっているから、素直に換算するとCortex-A76はCortex-A72比で2.4~2.6倍の性能と言う事になるが、そこまで性能差があるとは思えない。良くて2倍程度だろう。なのでコア数が4倍なら性能は8倍になる訳だが、実際にはメモリ帯域の制約もあるだろうし、コア数が4倍だから多少動作周波数を落とさないと消費電力的にも厳しいと思われる。数字としてはNeoverse N1ベースの64コアSoCとしては妥当な範囲に収まっていると思われる。
クルマが自動運転へと進化するのに必要なもの
さてもう1つ、TechConでは同社のDipti Vachani氏(SVP&GM, Automotive & IoT Line of Business)が担当した関係でSmythe氏が言及しなかったが、今回追加されたのが自動運転に関する取り組みである。AVCC(Autonomous Vehicle Computing Consortium)は、まさにそのArm TechConの基調講演の中で発表されたもので、自動運転のためのプラットフォームを共同で構築しよう、というものである(Photo03)。
-

Photo03:後でSmythe氏に「ドイツの自動車メーカーが1つもない理由は?」と聞いてみたところ、「まずは立ち上げる必要があり、丁度同じ思いを抱いているメーカーが集まったのが最初の10社だ。ただ、我々は他のメーカーの参加はいつでもWelcomeだ」という回答をいただいた

ここで「The Missing Link」とあるのは、元々Vachani氏のTechConにおける基調講演が、ただの車から自動運転車に進化させるためには
- Safety
- Software
- Compute
- Collaboration
の4つが必要で、このうち1~3はArmやArmのエコシステムパートナーから提供できるので、現在提供中であるが、4だけはどうしようもない、という事に起因する。この4が、自動運転を実現するためのMissing Linkになっており、これを埋めるためにAVCCを立ち上げた、と言う訳だ。
Armが進める自動運転実現に向けたエコシステムの構築
さてArm Tech Symposiaの方ではAVCCのボードメンバーも務める谷口覚氏(Photo04)が最後の基調講演としてこのAVCCの説明を行われたのがちょっと新しい。基本的なAVCCの考え方は、要するに自動運転に関わるすべての部分で他社と差別化、というのは現実問題として労力が非常にかかるし、解決が難しい問題も多数ある。
-

Photo04:TRI-AD(Toyota Research Institute-Advanced Development)の谷口覚氏(VP, Head of Automated Driving Core Technology)

その一方、例えばハードウェアプラットフォームはある程度共通化しても、それで商品性が損なわれることには必ずしもつながらないという話もある訳で、であれば共通化できるところは共通化しましょう、という取り組みである。
このあたりをまとめたのがPhoto05で、自動運転に必要となるハードウェアに対する要求をある程度抽象的にまとめた上で、そこで利用できるソフトウェアAPIの構築に向けて必要となるものをまとめよう、という取り組みである。まずはコンセプトプラットフォームを、2025年の実車搭載というタイムラインに向けて構築すべくワーキンググループがすでにスタートしているとの話であった。
-

Photo05:意地の悪い見方をすれば、仮にこの取り組みが失敗したとしても、ここの作業で得られた成果は相応に役に立ちそうに思える。問題は、他の自動運転プラットフォームとのすり合わせだろうか?

ただ谷口氏の話では、水面下では2019年3月に結成され、そこから色々活動を続けてきたらしいが、そこから半年以上たってもまだ当初の10社のコアメンバーしか存在しない、というあたりは(もちろん非公開だからという話はあるにせよ)色々厳しいものがある。上でもちょっと書いたが、自動車メーカーがトヨタとGMしかいない、というあたりも難しさを感じる(逆にTier 1が勢ぞろいしているのがちょっとアレだが、でもMagna Internationalが入っていないあたりも色々考えさせられる)。それもあってか、谷口氏は講演の中で何度も「ぜひ加盟を検討していただきたい」と聴衆に訴えかけていたのが印象的であった。