多層セラミック・コンデンサ(MLCC)の供給不足は、ますます深刻になっており、この状況は2020年まで続くと思われます。
MLCCは、信頼性が高く占有面積が小さいため、あらゆる種類の電子機器に使われています。そのため、メーカーでは、セラミック・コンデンサをポリマーなどの他のタイプのコンデンサに置き換えることを検討しています。一方、ハードウェア設計の時点で、TIのD-CAP+TM制御モードを搭載した多相コントローラ、コンバータ、「TPSM831D31」などのモジュールを使用することによって、競合製品よりもマザーボードのMLCC数を少なくすることができます。
D-CAP+制御モードは、パルス幅変調方式のコントローラとコンバータを制御するTI独自のアーキテクチャで、入力電圧や相数などが変動する条件でも、きわめて容易なループ補償と優れたループ安定性を実現します。
D-CAP+制御モードは、リップル電流の注入またはエミュレートを利用するD-CAP2およびD-CAP3制御トポロジとは異なり、真のインダクタ電流センシングを実装した電流モード固定オン時間制御です。D-CAP+制御モードには、定常状態時の固定オン時間制御と負荷過渡時の適応型オフ時間制御(AC応答)があります。このモードでは、負荷過渡に対して、高速に応答し、出力電圧を維持するため、オフ時間が適応され、より多くのパルスが生成されます。
オン時間が調整されるため、不連続導通モード(DCM)で自然な時間ストレッチングが行われ、連続導通モードとDCMとの境界を越えるときに、より高い効率でスムーズな制御ができます。D-CAP+制御モードは、補償が容易なため、電圧モード制御アーキテクチャに必要なタイプ3の複雑な補償回路が不要です。
プロセッサ、ASIC、FPGAの負荷過渡に対し、D-CAP+制御モードは、固定周波数の制御アーキテクチャよりもはるかに高速に応答できるため、充放電で負荷にエネルギーを供給するMLCCの数が不足する場合でも、厳格な公差仕様を満たすことができます。
図1は、TIの電圧モード・コントローラとD-CAP+コントローラの負荷過渡応答を比較した結果を示します。D-CAP+制御モード・コントローラ「TPS53647」では、クロスオーバー周波数が低いにもかかわらず、オーバーシュートもアンダーシュートも低くなっています。
-
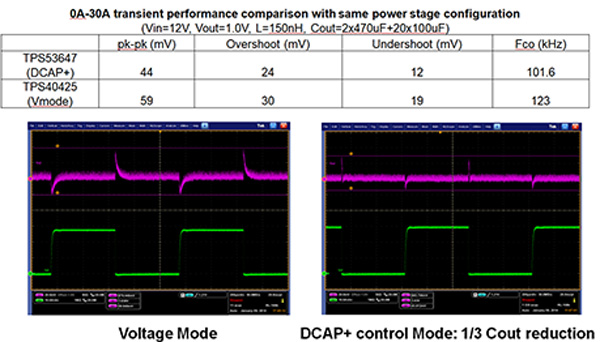
図1:電圧モード・コントローラとD-CAP+コントローラの負荷過渡応答の比較

競合製品の非D-CAP+多相コントローラと比較した場合でも、同様の結果になります。図2は、負荷過渡反復率1kHz、負荷ステップ60A(180A~240A)で負荷過渡応答を比較した結果を示します。この場合も、D-CAP+コントローラの方がオーバーシュートもアンダーシュートも低くなっています。上記の結果は、同じマザーボード上でまったく同じ条件により再現されています。D-CAP+コントローラ「TPS53681」は、さらに良好な負荷過渡応答と高速な出力電圧セトリングを達成できます。
-
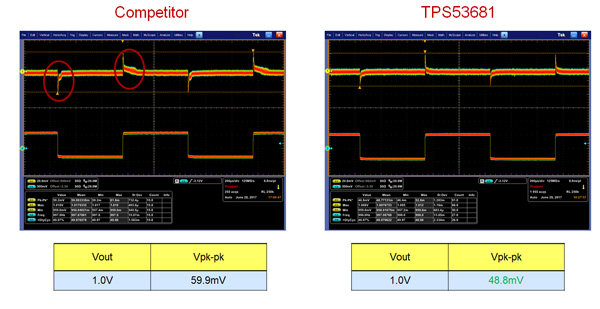
図2:他社製品とTIのD-CAP+コントローラとの負荷過渡応答の比較

最後に、CPUベンダーのリファレンス・デザインとTI独自のVcore設計との比較結果を紹介します。熱設計電流(TDC)は116A、最大電流(IMAX)は395Aです。
テスト・データは、D-CAP+コントローラによって負荷過渡応答を高速にできることを示しています。つまり、CPUベンダーのリファレンス・デザインと比較してMLCC数を大きく節減できることがわかります。
表1は、この結果をまとめたものです。D-CAP+制御ソリューションは、MLCC数を42個、出力容量を700μF以上減らしているにもかかわらず、CPUのオーバーシュート/アンダーシュート仕様を満たします。D-CAP+制御モードの電圧レギュレータと、競合製品のレギュレータとを比較した場合も、表1の結果が当てはまります。
-

表1:CPUリファレンス・デザインとD-CAP+制御ソリューションのMLCC数の比較 (TDC=116A、IMAX=395A)

MLCCは引き続き供給不足の見込みです。新規プロジェクトをいち早く市場投入するためには、部品表のMLCC数をできるだけ少なくする必要があります。TIのD-CAP+コントローラ、コンバータ、モジュールは、そのための選択肢の1つとして考えられるでしょう。
参考情報
著者プロフィール
George Lakkasテキサス・インスツルメンツ
電源IC 昇圧/マルチチャネルおよびフェーズ DC/DCコンバータ部門
プロダクトマーケティング・マネージャー