既報のように、宇宙航空研究開発機構(JAXA)は9月21日、小惑星探査機「はやぶさ2」の小型ローバー「MINERVA-II」の分離運用を行い、分離に成功したことを明らかにした。探査機本体のシーケンスは、すべて順調に実施。着陸の確認は今後になるものの、小惑星に着陸し、ホッピングによる移動に成功すれば、世界初の快挙となる。
MINERVAシリーズ悲願の着陸となるか
はやぶさ2は、前日(20日)の14:10より降下を開始。当初は40cm/sという速度で、高度5kmからは10cm/sに減速し、順調に降下を続けた。高度60mまでは赤道上空にいたが、そこで降下速度を一旦ゼロにし、水平方向にスラスタを噴射して北半球側に移動。その140秒後の21日13:06頃、ローバーを固定していたワイヤーを切断し、探査機から分離した。
-

今回の分離運用のシーケンス (C)JAXA

分離時の高度は55m。初号機のときは、探査機が上昇したタイミングで地上から分離コマンドが届いてしまい、着陸に失敗していた。しかし、はやぶさ2では、自律制御で分離のタイミングを制御、降下中でしか分離を行わないはずなので、初号機と同じ失敗はあり得ない。この低高度で分離さえできていれば、着陸はほぼ間違いないと見られる。
分離後、ローバーは15分~30分程度でリュウグウ表面に到達するが、バウンドするため、静止するまで少し時間がかかる。その後は、ローバーが自分の判断で行動し、移動と撮影を繰り返す予定だ。リュウグウの夜側では太陽電池の発電ができないため、ローバーは休止。真昼の暑いときにも休止するため、朝夕の活動が中心になるという。
MINERVA-IIには、ローバー2機のMINERVA-II-1と、ローバー1機のMINERVA-II-2があり、今回分離が行われたのはMINERVA-II-1の2機だ。分離後の2機とは、正常に通信が行われており、分離後に自律モードへ移行したことも確認されている。
もしローバーから地表の画像が届いたら、それは着陸成功の動かぬ証拠となる。基本的には、ローバーからの画像を待つしかないが、分離の1時間~1時間半後あたりで、電圧の低下が確認された。これは、ローバーが着陸に成功し、リュウグウの自転で夜になったと考えると辻褄が合う。着陸成功が期待できるデータと言えるだろう。
吉川真ミッションマネージャ(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授)は、「着地した状態で表面を横から撮影するのは探査機では不可能。科学的に期待している」とコメント。また津田雄一プロジェクトマネージャ(同 宇宙飛翔工学研究系 准教授)は、「リュウグウの地表から夜空を見上げた景色が早く見たい」と笑顔を見せた。
-

吉川真ミッションマネージャ(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授)

-

津田雄一プロジェクトマネージャ(JAXA宇宙科学研究所 宇宙飛翔工学研究系 准教授)

探査機本体は、ローバーを分離した1分後、高度53m程度の地点でスラスタを噴射して上昇を開始。現在、高度20kmのホームポジションへ戻る途中だ。探査機の状態は正常。ホームポジションに到着するのは22日午後になる予定で、その前後から順次、地球へのデータ送信を開始するため、着陸の確認はそれ以降になると見られる。
タッチダウン本番に向けた準備も
今回の運用の目的はもちろんMINERVA-IIの分離であるが、それと同時に、レーザー高度計(LIDAR)の動作確認も重要なミッションとなっていた。
LIDARは、レーザーパルスを地表に照射し、反射して戻ってくるまでの時間から、高度を測定する装置。しかし、先日実施した1回目のタッチダウンリハーサルでは、高度600m付近で計測できなくなり、降下を中断していた。
LIDARは、25kmという遠距離から、30mという近距離まで使う必要があるが、1つのセンサーでこれほどのダイナミックレンジを確保するのは難しいため、遠距離では有効径110mmの大きなカセグレン望遠鏡を使い、近距離では有効径3mmの小さな望遠鏡に切り替える。この切り替えのタイミングは、光量から自動で判断する仕組みだ。
-

レーザー高度計(LIDAR)の概要 (C)JAXA

前回は高度600mまでに近距離モードへの切り替えが行われる予定だったが、反射光が予想したよりも弱く、それまでに切り替えることができなかった。今回はパラメータを見直し、遠距離モードを高度150mまで許容。その結果、高度300mで正常に切り替えが行われ、最後まで正常に動作したことが確認できた。
これで、接近高度の記録を、600mから53mまで一挙に更新。これについて、津田プロマネは「表面スレスレまで探査機を降下させることができ、大きなハードルを越えた」と述べ、「着陸に向けての大きな自信になった」と評価した。
ただ、高度40m以下で使用する予定のレーザーレンジファインダ(LRF)の動作確認は、今回は行えなかった。10月下旬のタッチダウン本番の前に、もう1回リハーサルを行う予定なので、LRFについてはそのときに確認することになる。
また前回のリハーサルは途中で中断したため、探査機の誘導精度の確認と、小惑星表面の接近観測が行えなかった。そのため今回の運用では、併せてこれらも実施した。
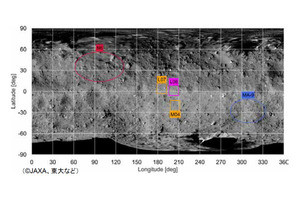
今回、MINERVA-II-1は北半球の「N6」地点に投下する計画で、実際に精度良く探査機を誘導できたという。はやぶさ2で想定していた着陸精度は100m四方。「まだデータを精査しないと数字は言えないものの、100m四方の内側には十分入れそうな感触」(津田プロマネ)とのことだが、安全に着陸するために、「さらに精度を上げたい」(同)とした。
-

MINERVA-II-1の着陸地点は北半球の「N6」 (C)JAXA

一方、はやぶさ2の着陸候補地点は赤道上の「L08」だが、今回の運用では、望遠カメラ「ONC-T」を使い、高度数100m程度から撮影できているはずだという。今までよりも高分解な画像で、より小さな岩塊まで写っていることが期待される。L08に安全に着陸できそうな場所があるのかどうか、今後の解析結果が気になるところだ。
-

航法用に広角カメラ「ONC-W1」が撮影した画像(高度80m)。黒い部分はデータの欠損だ (C)JAXA