宇宙航空研究開発機構(JAXA)は11月22日、今年度中の打ち上げを予定している「SS-520」ロケット4号機について記者説明会を開催した。同機は、全長9.54m、直径0.52mの3段式ロケット。3Uサイズの超小型衛星「TRICOM-1」を低軌道に投入する予定で、これに成功すれば、世界最小の衛星打ち上げロケットとなる。

|

|
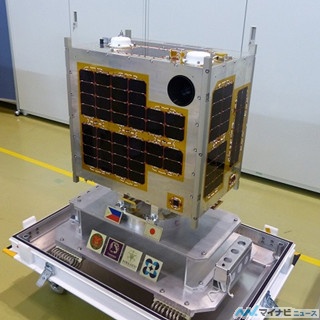
JAXA相模原キャンパスでは、搭載衛星「TRICOM-1」の公開も行われた |
公開時の状態。衛星の下にある第3段は試験用のダミーとなっていた |
SS-520ロケットは本来、弾道飛行を行う2段式の観測ロケットである。燃料は2段とも、固体燃料(ブタジエン系コンポジット)を使用。第1段に搭載された尾翼で機体をスピンさせ、姿勢を安定して飛行する。140kgのペイロードを約800kmの高度まで打ち上げる能力があり、これまでに2回(1998年と2000年)使用されたことがある(※)。
※3回目の打ち上げなのに「4号機」になっているのは、すでに別の計画で「3号機」があるため
4号機は、既存の第2段の上に、新規開発の第3段を追加。全段固体の3段式ロケットとして、衛星打ち上げ能力を持たせたものだ。3段モーターの推進剤は78kg搭載。モーターケースはCFRPを使い、低コスト化を図っているという。追加した第3段によりさらに増速することで、低軌道に4kg以上の衛星を打ち上げる能力がある。

|

|
SS-520ロケット4号機の概要。黄色の部分が今回の新規開発 |
JAXAの衛星打ち上げロケットとの比較。格段に小さいことがわかる |
近年、低コストで開発できる超小型衛星の利用が世界的に盛んになっているものの、課題となっているのが打ち上げ手段である。衛星を安く作れても、ロケットが高ければ利用の拡大は難しい。そのため現在は大型ロケットへの相乗りが主流となっているが、これだと打ち上げの時期や軌道を自由に選ぶことができない。
もし安価な超小型衛星用ロケットがあれば、この問題を解決できる。日本では現在、北海道のベンチャー企業インターステラテクノロジズ(IST)が液体燃料ロケットを、植松電機と北海道大学が共同でハイブリッドロケットを開発中。ただ、周回軌道への打ち上げは、早くてもあと数年はかかると見られている。
今回、JAXAがSS-520ロケットを衛星打ち上げ用に改修したわけだが、これで超小型衛星の打ち上げ市場に参入する――というわけではないようだ。今回のロケットは、民生技術を用いて安価に超小型衛星を打ち上げる技術の実証が目的。今のところ次回の予定はなく、ロケットをシリーズ化する計画もないという。
ロケットの名称が「SS-520」と従来どおりなのはそのためだろう。固体の3段なので、本来であれば「SSS-520」という名前の新型ロケットとしても良さそうなものだが、JAXA内の位置付けとしては、4号機はあくまでも2段式のSS-520ロケットで、「第3段と超小型衛星がペイロード」というわけだ。
それに実用性を考えると、打ち上げられる軌道にやや難がある。搭載衛星の軌道は、近地点180km、遠地点1500kmという長楕円なのだが、近地点高度が低く、大気抵抗を強く受けるため、衛星は1カ月程度で再突入すると見られる。このロケットの性能上、近地点高度をこれ以上高くするのは難しく、実用化してもニーズはかなり限られるだろう。
今回の実験は、経済産業省の委託事業により実施された。プロジェクトの予算は2年間で4億円。ロケット全体の打ち上げコストは非公表だが、この予算内で第3段と搭載衛星の開発を行ったという。実験を担当したJAXA宇宙科学研究所の羽生宏人准教授は、「今回実証する技術が民間企業でも活用されることを期待する」とコメントした。

|

|
JAXA宇宙科学研究所・宇宙飛翔工学研究系の羽生宏人准教授 |
フライトシーケンス。打ち上げはJAXA内之浦宇宙空間観測所で実施する |
また搭載衛星については、開発を担当した東京大学(中須賀・船瀬研究室)の松本健研究員より説明があった。TRICOM-1のサイズは116×116×346mm、重量は約3kg。同大学で開発した50kg級衛星「ほどよし3号」「同4号」の成果が活用されているという。なおTRICOM(トリコム)という名称は、日本語の「取り込む」から来ているそうだ。

|

|
東京大学(中須賀・船瀬研究室)の松本健研究員 |
TRICOM-1の概要。2つのミッションが用意されている |
予定しているミッションは、ストア&フォワードと地球撮像の2つ。
ひとつめのストア&フォワードは、地上の小型端末(各種センサーなど)から送られるデータを衛星側で収集し(ストア)、地上局の上空を通過するときに転送する(フォワード)という仕組み。携帯電話が圏外になるような僻地でも利用しやすく、超小型衛星の新しい使い方として注目されており、ほどよし3号/4号でも技術実証が行われていた。
TRICOM-1のストア&フォワード技術実証では、特定小電力の無線を使用している点が大きなポイントになる。通常、衛星通信のためには周波数の国際調整が必要になるため、申請して許可を得なければならないが、特定小電力ならこの手続きは不要。日本国内ならどこでも自由に使えるので、利用しやすくなる。
もうひとつの地球撮像のためには、メインカメラと5つのサブカメラを搭載している。各面にひとつずつカメラがあるので、衛星がどんな姿勢になっていても、必ず地球を撮影することができるわけだ。カメラはどちらも民生品を活用。メインカメラはコンパクトデジカメ、サブカメラはスマートフォンから流用したそうだ。
ロケット側がスピン安定のため、分離時には衛星もそのまま1.6回転/秒程度でスピンすることになる。これだと撮影や通信に問題があるため、回転軸に搭載された1軸のリアクションホイールで回転速度を抑えてから、3軸の磁気トルカを使って姿勢制御を開始する予定とのことだ。

|

|
衛星の結合部。分離機構は火工品ではない新しい方式を試すという |
ここにメインカメラがあるはずだが、カバーがあって見えなかった |