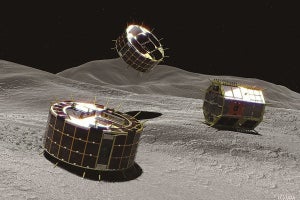
宇宙航空研究開発機構(JAXA)は9月24日、小惑星探査機「はやぶさ2」に関する記者説明会を開催し、小型ローバー「MINERVA-II2」の分離運用について詳細を発表した。探査機からの分離を実行するのは10月3日。小惑星リュウグウを周回させ、重力場を高精度に推定、内部の密度分布の違いを調べる計画だ。
-

大学コンソーシアムが開発したMINERVA-II2。形状は8角柱だ (C)JAXA

計画を転換したMINERVA-II2
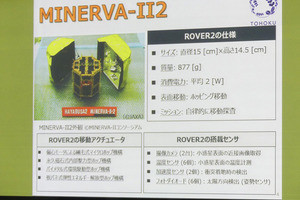
MINERVA-II2は、東北大学が代表を務める大学コンソーシアムが開発したローバーである。サイズは、直径が15cmで高さが14.5cm、重さは877g。山形大学、東北大学、大阪大学、東京電機大学が担当した4種類の移動アクチュエータを搭載しており、小惑星表面で移動できるか試す計画だった。
-

MINERVA-II2の仕様。自律的に移動し、探査を行う予定だった (C)JAXA、東北大

-

搭載する4種類の移動アクチュエータ。仕組みはすべて異なる (C)JAXA、東北大

しかし、打ち上げ前の最終試験で問題が発生。データ処理系で使われているFPGAが正常に動作しないという深刻な問題で、このままではアクチュエータの作動も、センサーやカメラによる観測もできない、という事態になっていた。
このあたりの経緯について、詳しくは過去記事を参照して欲しい。
探査機から分離すると、電源系統が切り替わるため、現象が好転する可能性もゼロではないものの、極めて小さい。東北大学の吉田和哉 教授は「当初の目的を果たすのは困難」との見通しを示した上で、「開発当初の目的に拘るのでは無く、MINERVA-II2の分離運用を通して、何か科学的に有意義な成果を得ることはできないか検討してきた」という。
-

東北大学の吉田和哉教授

検討の結果、決まったのが冒頭で述べた小惑星の周回ミッションである。高度1kmで、ローバーを東方向に分離。赤道上空を周回させ、分離後の運動を、探査機のカメラで撮影する。ローバーは分離後、約5日間、約8周してから、小惑星表面に着地する予定。落下速度は秒速50cm程度と遅く、ローバーが壊れる可能性は低いという。
-

周回軌道の予測。徐々に高度を下げて、最終的には落下する (C)JAXA、東北大

無事着地したとしても、データ処理系が復活しない限り、アクチュエータを作動させることはできない。ただ、山形大学のバイメタルを利用した移動機構は、モーターは使わず、温度変化を利用しているため、動作する可能性がある。しかしもし動いた場合でも、探査機から観測するのはほぼ不可能なため、確認の方法は無い。
重力場の推定という理学的成果のほか、工学的成果も期待できる。吉田教授は、「将来のミッションでは、探査機でキューブサットを持って行って、小天体を周回させることもあるかもしれない。そういうことに道を拓くことができれば、この実験にも意義があるのではないか」と、狙いを述べた。
ローバー分離運用のリハーサルとして、JAXAは9月12日より、ターゲットマーカーの分離運用を行った。高度1kmにて、2個のターゲットマーカーを、東向きと北向きに分離(水平方向の速度はどちらも秒速12cm)。高度20kmのホームポジションから、周回中のターゲットマーカーを撮影することに成功したという。
-

ターゲットマーカー分離運用の結果。現在、観測データを取得中だ (C)JAXA

ローバーの分離も同様の方法で実施する。異なるのは分離後の探査機の動きで、今回はホームポジションにすぐ戻るのではなく、高度8~10kmにしばらく滞在し、より近くからローバーの運動を観測する。周回中のローバーは、小惑星と重なっているときは見えにくいものの、背景が宇宙空間のときは観測しやすい見通し。
-

ローバー分離運用の計画。こちらも東向きに分離する計画だ (C)JAXA

ローバーの分離装置による放出速度は、秒速13cm~17cm程度。ターゲットマーカーと同程度の周回速度にするため、探査機は分離時に水平方向に移動し、速度を少しキャンセルする。なおターゲットマーカーに比べると、ローバーの方が3倍重いため、"センサー"としては、感度が3倍高いと言える。
リュウグウへ接近するミッションもいよいよこれで最後。MINERVA-II2を分離し、ホームポジションに戻ったら、地球帰還に向けた準備を本格化する予定だ。
リアクションホイールに問題?
ところでターゲットマーカーの分離運用は当初、8月31日より開始する予定だったのだが、同29日に行ったリアクションホイールの動作試験中に、探査機がセーフホールドモードに移行したため、延期していた。今回の説明会では、この点についても説明があったので、補足しておきたい。
-

JAXAの吉川真ミッションマネージャ(右)と久保田孝研究総主幹(左)

リアクションホイールは内部に高速回転する円板を持った装置で、姿勢制御に利用される。3軸姿勢制御のためには、最低3台が必要だ。一般的には冗長構成として、4台を斜めに配置する"4スキュー"にすることが多いが、はやぶさ2はXYZ軸の直交配置で、Z軸のみ2重にするという、やや変わった構成を採用している。
これは初号機の経験を反映させたものだ。初号機はX軸、Y軸のリアクションホイールが相次いで壊れ、Z軸の1台だけになってしまった(初号機は3台のみ搭載)。しかも姿勢制御を代行できる化学推進系も、燃料漏れによって使用不能に。そんな状態でも地球に帰還できた実績があるため、Z軸さえ無事ならなんとかなる、そういう設計思想が背景にある。
今回、問題が発生したリアクションホイールは、そのZ軸のバックアップ用のものだ。最後に動かしたのは2018年10月とのことで、約10カ月ぶりに回転させたところ、トルク値が想定より大きく、設定していたしきい値を超えていたため、探査機は安全を確保しようと、セーフホールドモードに移行したというわけだ。
-

セーフホールドモードに移行したため、ターゲットマーカーの分離を延期 (C)JAXA

トルク値が大きかった原因についてはまだ分かっていない。ただ、残りの3台が使えれば姿勢制御に問題はなく、この3台は今のところトルク値も正常であるため、探査機の運用上、特に支障が生じているわけではない。JAXAは今後、追加の動作試験などを行い、時間をかけ、原因を調査する予定だ。
初号機は、M-Vロケットの打ち上げ時の振動が大きかったため、リアクションホイールを特別に一部改修していた。初号機では、この補強した部分が剥離したと見られているが、はやぶさ2はH-IIAロケットだったため、実績のある標準品をそのまま搭載しており、同様の理由で故障することは考えられない。
現時点では、トルク値が少し大きかったというだけで、回転自体はできている。これで直ちに使えなくなったというレベルではない。とはいえ不具合の前兆である可能性もあり、楽観はできないだろうが、継続して動かせば元に戻るという見方もあり、いずれにしても今後の調査結果を待つ必要があるだろう。