宇宙航空研究開発機構(JAXA)は6月11日、小惑星探査機「はやぶさ2」に関する記者説明会を開催し、先月末に実施した低高度運用「PPTD-TM1A」の結果と、同日より実施する「PPTD-TM1B」の計画について説明した。TM1Aでは、予定通りの領域にターゲットマーカー(TM)を投下することに成功。誤差はわずか3mで、タッチダウンの目的地は「C01-C」に絞られた。
-

JAXAはやぶさ2プロジェクトチームの吉川真ミッションマネージャ

C01-Cに着陸する理学的・工学的価値
このPPTD-TM1Aは、5月28日~30日に実施。前回(PPTD-TM1)はレーザー高度計(LIDAR)の問題で高度50m付近で降下を中止していたが、対策を施して臨んだ今回は同じ問題は起きず、高度約9mでターゲットマーカーを分離することに成功した。リュウグウへのターゲットマーカーの投下は今回が2回目(はやぶさ初号機は1回だけだった)。
-

ターゲットマーカーは全部で5個(A~E)搭載。今回使われたのはAだ (C)JAXA

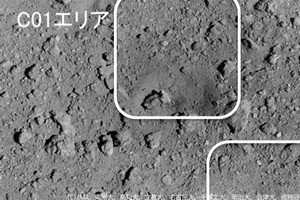
気になるのはターゲットマーカーの投下場所だが、今回目標としていたC01-C領域の中心地点からは、わずか3mほどしか離れていないことが分かった。はやぶさ2のピンポイントタッチダウンの精度には、目印となるターゲットマーカーからの距離が大きく影響する。成功した1回目タッチダウンでは約6m離れていたので、それより近いのは好材料だ。
-

白矢印の先にあるのがターゲットマーカー。精度良く投下できた (C)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研

C01-Cにタッチダウンするには絶好のポジションに投下できたことから、続くTM1B運用ではターゲットマーカーの分離は行わない。今回の降下で地形データも十分取得できており、TM1Bは主目的をサイエンスに切り替え、衝突装置(SCI)運用で生成された人工クレーターの接近観測を行う予定だ。
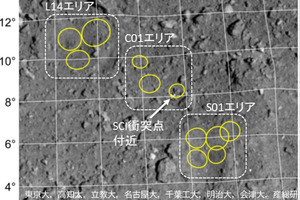
2回目タッチダウンの候補地点としては、前回までにC01とS01の2カ所に絞られていた。今後、実際にタッチダウンを実行するかどうかはまだ検討中とのことだが、今回の結果、目的地はC01-C領域に一本化された。リュウグウ表面が高温になる7月上旬までに実施する必要があるため、この1~2週間で結論を出す。
-

タッチダウン候補地点の位置関係。C01はクレーターに最も近い (C)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研

実施するかどうかの判断は、「理学的・工学的価値」「運用成立性」「探査機状態」の3つの観点で構成される7つの判断項目を踏まえて決定される。すでに7項目のうち、5項目は条件を満たしており、今後、安全なタッチダウンシーケンスが設計できるかどうか、1回目のタッチダウンで受光量が低下した光学系で支障がないかどうか、という点を中心に検討していく予定だ。
-

タッチダウンの可否を判断する基準。検討中なのは下の2つのみ (C)JAXA

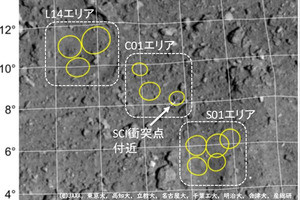
理学上の大きな目的は、小惑星の内部物質を採取することだ。この点については、C01-Cは大いに期待できる。今回の会見では、SCI運用前後の反射率の変化を調べた画像が初公開された。黒くなった場所にイジェクタ(噴出物)が多く堆積していると考えられ、C01-Cには平均して1cmほどの厚さがある見込みだという。
-

イジェクタは偏在。S01側にはあまり飛散しなかったことが分かる (C)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研, 神戸大学

工学的にも、世界初のマルチサンプリング(複数箇所からの採取)、地下サンプリングを実証する意義は大きい。リュウグウのように、比較的均質な表面を持つ小惑星でも、SCI運用で内部物質を露出させ、それを採取できれば、理解がさらに深まる。今後のサンプルリターン計画における重要な技術となるだろう。
投下精度を5倍も向上させた技術とは?
以前、1回目のタッチダウンのためにターゲットマーカーを投下したときは、目標地点からの誤差は15mほどだった。このくらいの誤差でも、当初目標としていたL08-B1領域への着陸が難しくなってしまい、より近くのL08-E1領域を目指すことになったわけだが、今回はわずか3mの誤差だったので、全く問題は無い。
-

前回の投下誤差は15mだったので、精度は5倍に向上したわけだ (C)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研

降下運用において、探査機の航法誘導制御を担当したJAXAの大野剛氏は、「航法誘導制御の精度を上げたおかげで、これを実現できた」とコメント。「ターゲットマーカーの位置のみに限定して言えば、タッチダウン可能な状態になったと言え、ひとまず喜んでいる」と安堵の表情を見せた。
-

JAXAの大野剛氏。降下運用の航法誘導制御を担当した

はやぶさ2は降下時、「GCP-NAV」と呼ばれる手法で探査機の軌道を制御する。これは、人間が専用ツールを使い、探査機から届く小惑星の画像を見ながら、探査機の相対位置を推定するという、日本独特の手法。表面に特徴が乏しい小惑星でも、人間の画像認識能力を使えば、大間違いする恐れが小さいという特徴がある。
事前に、予定の軌道(これを参照軌道と言う)を用意しておいて、それからズレていたら、修正するようにスラスタを噴射する。ロボコンで一般的な競技にライントレースというものがあるが、感覚的にはこれに近い。探査機は、参照軌道という目には見えない"ライン"をトレースしていると考えれば分かりやすいだろう。
前回(TD1-R3)と今回(PPTD-TM1A)の降下軌道を比較すると、違いは一目瞭然だ。前回は、X方向とY方向の揺れ幅が収束しないまま降下していた。いわゆる制御ゲインが高い状態だ。しかし今回は、何度も振動することなく、最後の方で見事に収束している。
-

前回(TD1-R3)の降下軌道。このHP座標系では、Z方向に地球がある (C)JAXA
-

今回(PPTD-TM1A)の降下軌道。離れたところからグッと近づいて収束 (C)JAXA


実際の運用では、GCP-NAVで参照軌道からのズレを把握した後、ツールで探査機の増速量(ΔV)を算出する。今回は、そのパラメータを調整。前回よりも、噴射が抑えられ、参照軌道を通り過ぎにくいようになっているという。
また、前述のグラフを見ると、参照軌道そのものの設計も大きく異なっていることに気が付く。前回は、Z方向から比較的真っ直ぐ降下していたが、今回は、かなり斜めになっている。今回の参照軌道は、最初、大きく離れた場所から降下を開始することになるものの、より自然な軌道で最後には目的地点に辿り着くよう考えられたとのことだ。
-

精度向上の要因。航法誘導制御のほか、重力モデルの更新なども行った (C)JAXA

リュウグウには大きなボルダーが多い
今回の会見では、近畿大学の道上達広氏(工学部機械工学科 教授)より、科学雑誌「Icarus」に掲載された論文に関する説明も行われた。道上教授が調べたのは、リュウグウ表面に分布するボルダー(岩塊)の大きさや形。測定した数は1万個以上にもなり、その中でも5m以上の大きさのものは約4,400個もあったという。
-

近畿大学の道上達広氏(工学部機械工学科 教授)

形はいずれも、地上の衝突実験で壊れてできた破片と良く似ているとのこと。この結果は、リュウグウ表面にあるボルダーが、大きな母天体の衝突→破壊によって形成されたということを強く示唆している。小惑星の軽さから、もともとこの説はリュウグウの起源として有力視されていたが、それを強く裏付ける形となった。
-

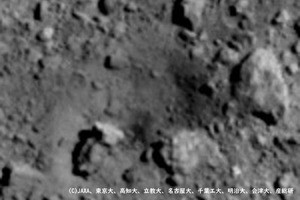
左下がボルダーの分布。赤道付近はやや少なめに見える (C)JAXA

瓦礫が再集積してできた天体をラブルパイル天体と呼ぶが、今回の調査で明らかになったリュウグウ固有の特徴としては、10m以上のボルダーの数密度が特に大きかったことがある。20m以上の大きなボルダーだとイトカワの2倍以上もあったそうで、同じラブルパイル天体でもかなり個体差があることが分かった。
-

サイエンスの成果。ボルダーの2軸比(縦横の比率)まで調べたという (C)JAXA

ところで、道上氏が今回持ち込んだリュウグウの模型はチタン製で、金属3Dプリンタで作ったものだという。なぜチタンで作ったのか、気になったので会見後に質問したところ、樹脂を積層するものよりも凹凸を精密に再現でき、地形による陰影も分かりやすいというメリットがあるのだそうだ。
-

チタン製というリュウグウ模型。ただし中空なので案外軽い