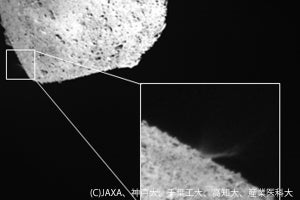
宇宙航空研究開発機構(JAXA)は5月22日、小惑星探査機「はやぶさ2」に関する記者説明会を開催し、今月14~16日に行った低高度降下観測運用(PPTD-TM1)の結果について報告した。レーザー高度計(LIDAR)の測定値に異常があったため、高度50m付近で降下を中断したものの、人工クレーター周辺の撮影には成功し、大きな成果が得られたという。
-

はやぶさ2の津田雄一プロジェクトマネージャ

精度が良すぎた故の新たな問題
はやぶさ2は先月、衝突装置(SCI)運用を実施、リュウグウ表面に人工クレーターを作ることに成功していた。衝突時には、イジェクタ(噴出物)が周囲に飛散。それを採取するための準備として、今回のPPTD-TM1では、着陸候補地点の1つである「S01」エリアに向かい、ターゲットマーカーの投下と、低高度からの接近観測を行う予定だった。
ホームポジションからの降下は、15日12:31に予定通り開始。探査機は順調に降下していたが、翌16日11:25、高度50m付近で前述の問題が発生、探査機の自律判断により降下を中断し、上昇に転じていた(アボート)。計画していたレーザーレンジファインダ(LRF)の動作テストや、ターゲットマーカーの投下は行えなかった。
-

PPTD-TM1の結果。高度50m付近でアボートし、ホームポジションに復帰 (C)JAXA

はやぶさ2は降下時、LIDARでリュウグウからの距離を計測している。今回は、高度50m通過時に受信感度を下げる設定にしていたところ、切り替えのタイミングでノイズが発生。本来は50mのはずが、一瞬だけ6kmという計測値を出力したという。探査機の誘導制御系コンピュータが異常と判断し、そこでアボートした。
LIDARは、レーザー光のパルスを出し、地表で反射して戻ってくるまでの時間から、距離を調べる装置。運用上、数10km~数10mという広いレンジで使う必要があるのだが、距離が3桁も変化すると、光量はその2乗で6桁も変わることになる。その変化に対応するため、LIDARには口径の違う2種類の望遠鏡と、感度を2段階に切り替える機能があった。
昨年9月のリハーサル運用(TD1-R1)では、やはりLIDARの問題により高度600mで降下を中止したことがあったが、このときは望遠鏡の切り替えだった。しかし今回はそれではなく、受光感度の切り替えが原因。1回目タッチダウンなど、これまではオートで感度を切り替えていた。低高度でシーケンスにより感度を切り替えるのは、今回が初めてだった。
実績ある方法を変更したのには、当然ながら理由がある。じつは1回目タッチダウンのときに、LIDARのレーザー光が、ターゲットマーカーに命中した形跡があったのだという。ターゲットマーカーは反射率が極めて高いため、受光量が一気に増え、LIDARが混乱する恐れがある。それを避けるため、シーケンスで感度を下げておこうという対策だった。
当初、はやぶさ2の着陸精度は50mと想定していたため、直径10cmのターゲットマーカーにレーザー光が命中する確率は極めて低く、全く考慮していなかった。しかし、1回目はピンポイントタッチダウンにより、わずか1mという精度での着陸に成功。想定以上の精度だったために、命中する確率も無視できなくなり、対策の必要性が生じたというわけだ。
ただ、今回の問題もLIDARのハードウェアに異常があったわけではなく、「切り替え方の問題」(津田雄一プロジェクトマネージャ)だったという。すでに対策は完了しており、次回以降は同じ問題は起きない見込みだ。
候補地点はS01とC01が有力か?
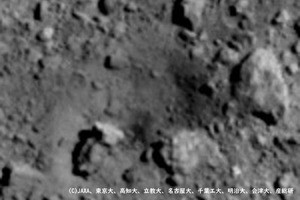
今回、予定通りの降下はできなかったものの、「良い方の想定外があった」(同)という。アボートになると探査機は上昇するのだが、そのときにも撮影は行うよう設定していたそうだ。タイミングによって、探査機がどちらの方向に上昇するかは運任せだったが、今回はたまたま人工クレーター側に飛行、高度500m付近からの撮影に成功した。
-

今回撮影した画像。これまでで最高の解像度の画像が得られた (C)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研

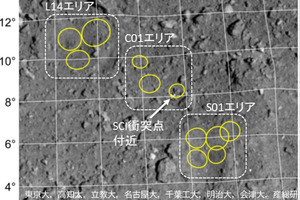
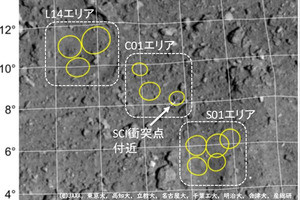
「上昇経路が絶妙に斜め」(同)だったため、今回の目標だったS01のほか、同じく候補地点である「C01」「L14」エリアの撮影にも成功。また斜めに飛行したため、視差を利用した立体情報も得られたという。予定では高度10mまで接近するはずだったので、それよりは遠かったものの、得られた画像の解像度は5cm程度と、解析には十分使えるレベルだ。
今回の立体情報から、タッチダウン成立性の解析を一部行ったところ、人工クレーター周辺のC01エリアについても、タッチダウンできる可能性があるというポジティブな結果が得られたという。
次のタッチダウンまでに、降下するチャンスは最大であと2回。今回得られた情報から、今後どのように運用するのがベストか検討し直した結果、5月28日~30日に実施する次の降下運用(PPTD-TM1A)では、C01にターゲットマーカーを投下することを目指すことになった。3回目の降下運用(PPTD-TM1B)については、2回目の結果を見て判断する。
-

今後の運用方針。TM1/TM1A/TM1Bと名前が似ているのは同様の運用だから (C)JAXA
-

PPTD-TM1Aの予定。S01ではなく、C01を目指すこと以外は、TM1と同様だ (C)JAXA


C01のあと、TM1BでS01に投下する可能性もあるし、もしTM1Aの投下場所が悪かったときは、TM1Bでもう1回C01を狙うことも有り得る。1回目タッチダウンでも、ターゲットマーカーは目標から15m外れているので、その着地場所次第ということになるが、いずれにしても降下はあと2回なので、事実上、候補はC01とS01の2つに絞られたと見て良いだろう。
次のTM1AではC01を目指すことになったが、現時点での優先度としては、S01とフラットだという。最初にC01にしたのは、これがS01よりも西側にあるからだ。
-

3エリアの位置関係。着陸候補点(黄色の円)には、それぞれ名前が付けられている (C)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研

リュウグウは自転しているので、はやぶさ2は相対的に東側から降下する形になる。はやぶさ2は仕様上、ターゲットマーカーが視野内に3個あっても識別する能力があるが、ここで新しい技術チャレンジを試すのはリスクも大きいため、1回目タッチダウンと同じように、視野内に見えるのは常に1個にすることをすでに決めている。
リュウグウ表面の近くに2個ターゲットマーカーを落とした場合、最初に見えてくる東側のものなら狙いやすい。しかし西側は、東側のものが視野に入ってしまう恐れがある。「西から順番に攻めることにした」(同)のは、そういう理由からだ。
今回、TM1は計画通りの運用ではなかったものの、「ターゲットマーカーを落とさずに、両方のエリアのデータが取れた。結果的には、もともとの計画より良かったかもしれず、そこは幸運だった」と津田プロマネはコメント。今後の運用計画については、遅れは生じないとの見通しを示した。
-

低高度での動き。TM1の当初計画と同様に、ジグザグ飛行で立体観測を行う (C)JAXA