岡山大学発ベンチャーのビジュアルサーボは11月9日、屋外の光環境が変化しても計測結果が変化しない計測特性が求められる農業用ロボット向けセンサについて、複眼カメラによる撮影とAIを用いた画像処理方法により、野菜や果物などの任意不定形対象物でも位置・寸法の計測を可能にする新技術を開発したことを発表した。
-

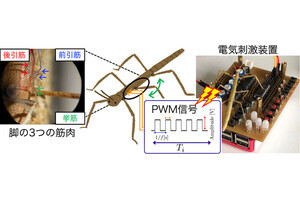
農業用ロボット搭載用の複眼ハンドアイカメラ。カメラ部から対象物(柿)の位置と寸法を測定し、その結果を基にハンド部を接近させて把持・収穫を行う。計測と接近を繰り返すことで、至近距離からの計測が可能となり高精度なロボット収穫作業が可能だという(出所:岡山大学)

従事者の高齢化や人手不足が叫ばれる農業の現場において、その作業を自動化・省人化する農業用ロボットへの需要が高まっている。こうしたロボットについては、外部の光環境が変化しても、対象物の位置や大きさに関する計測結果が変化しない計測特性が求められる。
しかしながら屋外で使用するロボットでは、空間計測(対象物の位置・寸法をリモート計測すること)を行う時点での周囲環境(晴雨・雲の移動・木漏れ日など)の変化や、太陽の日周運動による角度変化、季節による太陽高度の変化などといった時変光環境外乱の影響を大きく受けるため、計測の高精度化は困難だったとする。
これらの課題の解決に寄与しうる技術として、複眼カメラへの注目が集まっている。同カメラは、撮影時の光環境状況が左右のカメラそれぞれに同等に反映されるため、画像情報の比較に基づく画像処理時に、時変光環境外乱の影響を受けず、対象物の位置・姿勢・寸法を計測できるという特徴がある。こうした複眼の特徴を利用することで、時変光環境外乱に影響されない画像処理が可能となり、屋外の照度変化に影響されない空間計測が可能になるという。
そうした背景から、岡山大の見浪護特命教授(研究)が立ち上げたビジュアルサーボでは、ステレオビジョンを用いた空間計測について研究を続けているといい、任意対象物の3次元一姿勢を計測するコンピュータビジョンの構築に成功し、泳ぐ魚の寸法計測などを行ってきたとする。
そして今般、同社が開発し特許も保有しているAI手法を用いた画像処理方法を活用した結果、計測対象物の写真を事前に登録しておくことで、野菜や果実といった任意不定形対象物であっても、登録写真の変更のみで位置や寸法の計測が可能な計測システムを構築するに至ったとしている。
ビジュアルサーボによると、同システムでは可視光のみを用いて計測を行うため、太陽光下でも計測可能とのこと。空間計測センサとして市販され、一般的に用いられている画像情報と距離情報を組み合わせたRGB‐D画像を用いた空間計測手法では、距離計測に赤外線を用いるため、太陽光に含まれる紫外線が外乱として働いていたというが、今回はそうした課題も解決しているという。
また同社によると、性能確認のため、野菜・果物・日用品を16種類用意し、寸法を実測するとともに、屋外の日向(照度5万2000ルクス)および日陰(照度1530ルクス)で対象物の寸法と3次元位置を計測し、その照度差に影響されない位置・寸法の計測性能を実証したとする。また補正後の寸法平均誤差は1mm以下、標準偏差は3mm程度だったとのことだ。
-

実測した寸法と日向・日陰での3次元位置測定の結果(出所:岡山大学)

-
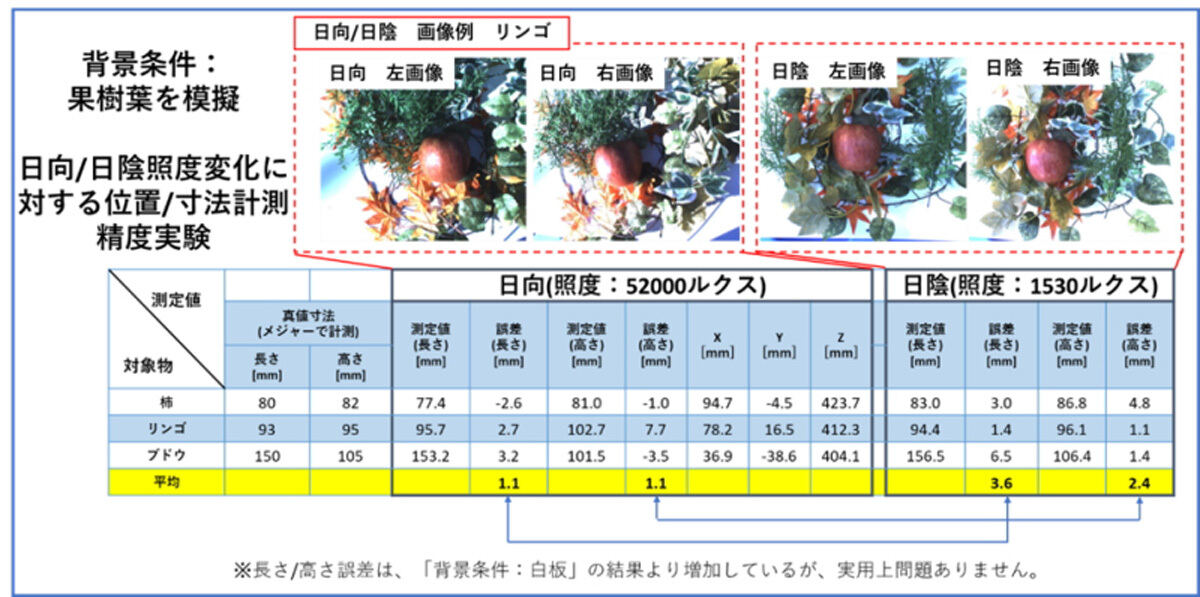
果樹葉を模擬した背景条件での、実寸と日向および日陰での3次元位置測定の結果(出所:岡山大学)

加えて、任意対象物の位置・寸法計測装置を小型化することで、移動ロボットのハンド部への取り付けを可能にしているといい、ロボットの動きによってカメラ視点を対象物の近くに移動させて計測できることから、高精度な空間計測により農作物を正確に把持・収穫する農業用ロボットの開発が可能になったとした。
ビジュアルサーボは今後、今回開発した計測システムを活用した果物・野菜収穫用ロボットの開発を、SECと共同で進める予定だといい、収穫時に果物の熟度などの計測・寸法に基づく仕分け作業なども可能な多機能ロボットの開発を進め、2023年度中に農場でのフィールドテストを開始する予定だとしている。