東北大学は9月28日、昆虫サイボーグの運動制御のための基礎的研究の一環として、ナナフシの脚筋に電気刺激を与え、その刺激に応じて筋肉が発生する力とそれに対応する関節トルクの変化を評価した結果、電気刺激の入力時間と生成される関節トルクとの間には線形関係があることを確認し、ナナフシの関節トルク生成において個体間で見られる共通の特性と個体差による変動の特性を明らかにしたと発表した。
同研究成果は、東北大大学院 工学研究科の大脇大准教授らと、独・ビーレフェルト大学の研究者が参加した共同研究チームによるもの。詳細は、生物学分野の専門誌「eLife」に掲載された。
近年、災害現場での捜索活動などを目的として、昆虫の卓越した運動能力と電子部品などを組み合わせた「昆虫ハイブリッドロボット(サイボーグ)」の研究が注目を集めている。微細加工技術の革新により、昆虫の生体とロボットを融合させる技術が発展しており、運動や飛行の操作および制御を目指す研究への関心が高まっている。
この昆虫サイボーグは、昆虫に備わった機能を利用することで、ロボット開発のための部品の設計や構造を簡素化できるうえ、消費電力が数mWとエネルギー効率の面で優れた特性を持つ。しかしまだ研究の初期段階にあることから、昆虫の個体差による変動(個体間変動)による影響などの課題が残されている。
個体間変動の課題を克服する有望なアプローチとして、昆虫の運動制御における個体間変動を規定する原理を理解することが挙げられる。筋肉は、神経活動を運動に変換し、環境との相互作用から行動を生成するために重要な器官であることから、今回の研究では、昆虫サイボーグの運動の精緻な制御の実現のため、外部からの電気刺激に応じて筋肉が収縮することで発生する力と、それに対応する関節トルクが、どのように変化するのかを系統的に評価することが目指された。
研究チームは今回、対象の実験動物としてナナフシを採用。中脚にあり、歩行生成に必須となる3つの脚筋(前引筋・後引筋・挙筋)のうちの1つを刺激して、その際に誘発される関節トルクを測定したとする。この測定にあたっては、パラメータの調整が可能なパルス幅変調(PWM)信号を生成する電気刺激装置を開発し、昆虫の運動ニューロンの活動を模擬した電気信号に反応して発生する関節トルクを測定したという。
-
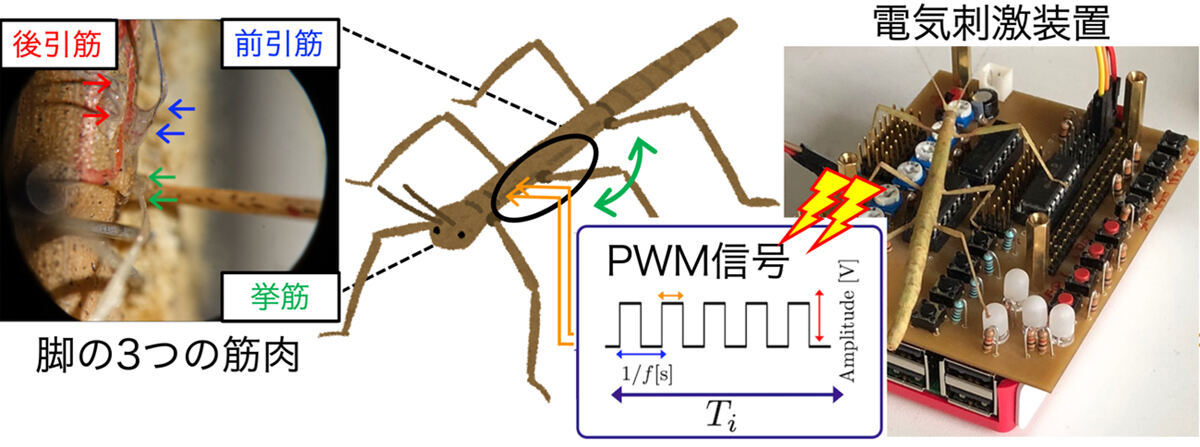
(図右)実験環境の外観図。開発した電気刺激装置からナナフシの筋肉へ電気信号を送信し、発生する関節トルクを力センサを用いて計測。(図左)電k刺激の対象とした3つの筋肉に電気刺激を送信するため、電極を外骨格内部に挿入した。(図中央下)神経信号を模擬したPWM信号。(出所:)

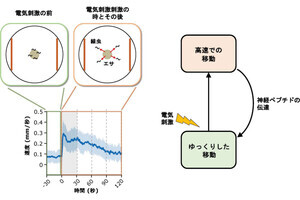
そして測定の結果、PWM信号の入力継続時間と発生する関節トルクの間には、区分的に線形な関係が観察されたとのこと。この線形関係が維持される時間領域は、中速から高速で歩行するナナフシの立脚相(300ms~500ms)と遊脚相(~250ms)に相当する時間領域だったとする。
さらに研究チームは、ベイズ統計モデリングとモデル予測評価のためのWAIC指標を用いて、6つのモデル(単純線形モデルや階層線形モデルなど)を評価。実験データをもっともよく説明する筋肉特性のモデルを特定し、特に個体間変動を考慮した階層ベイズモデルと個体間変動を考慮しない非階層ベイズモデルの予測性能を評価したところ、ナナフシの関節トルク生成における個体横断的に共通する関節トルク出力測定と個体間変動を説明できるパラメータの存在が明らかになった。
-
電気刺激の入力時間と関節で発生したトルクの関係(挙筋の例、ナナフシ10匹分のデータ)。500msまでの領域で線形的な関係を示した。(出所:)
研究チームによると、今回の研究によって明らかになった昆虫の筋肉特性のモデルは、昆虫の歩行、特に脚の運動や脚間の協調に関するさらなる理解のカギになるという。そして今後、この知見を基盤として昆虫の歩行メカニズムの謎を明らかにし、新たな歩行ロボット技術の道を開くことが期待されるとする。
今回構築された歩行制御法を無線搭載マイクロコンピュータに組み込むことで、昆虫を自在に制御できる超省エネバイオハイブリッドロボットの実現に貢献する可能性がある。この試みは、ロボットの設計・生産コストを大幅に削減し、生体昆虫を使用した先進的なサイボーグロボットの実現につながるとする。またこうしたロボットは、災害時の創作活動や環境調査など、従来のロボット技術では困難だった状況での活用が期待されるといい、さらに農業支援や生態系安定化など、持続可能な開発目標(SDGs)や環境問題への取り組みにも寄与する可能性を秘めているとしている。