大阪大学(阪大)と国際電気通信基礎技術研究所(ATR)の両者は、見た目の似ている対象が複数存在するとき、その対象の間でつながりを感じられる状況においてはより「かわいい」と感じられることを、写真および動画を用いて解明したと発表した。
-
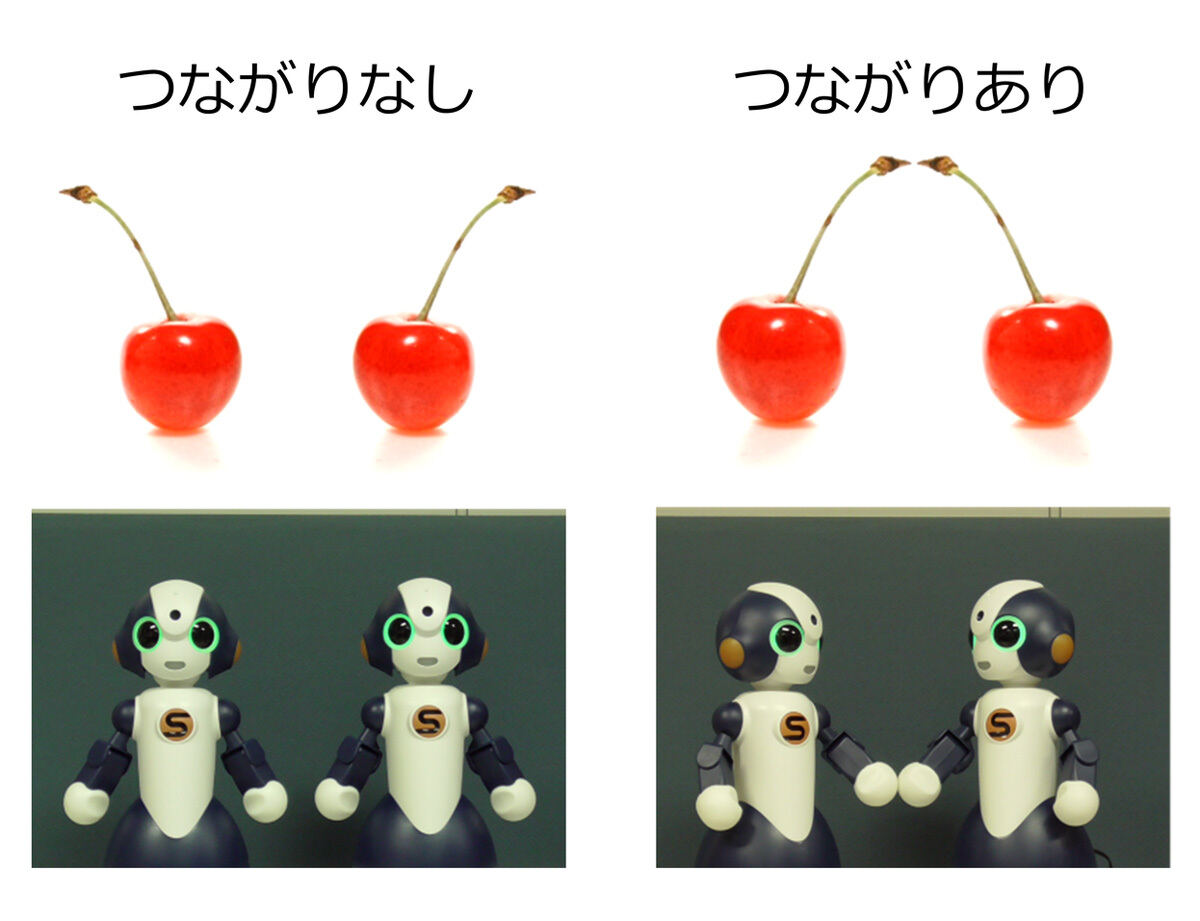
見た目が似ている複数の対象がただ並んでいる状態(左)よりも、つながりが見える状態(右)のほうが、人はより「かわいい」と感じることが示された(出所:大阪大学)

同成果は、阪大大学院 人間科学研究科の入戸野宏教授、ATRインタラクション科学研究所 エージェントインタラクションデザイン研究室の塩見昌裕室長らの共同研究チームによるもの。詳細は、米オンライン科学誌「PLOS ONE」に掲載された。
「かわいい」という感情は、人同士や人とモノとの交流を促すため、近年普及するペットロボットなどにおいても、その多くでかわいらしい見た目が採用されている。かわいいと感じる要因について、これまでは、丸みを帯びた顔や頭の大きさなど、個体が持つ特徴に起因したものであると考えられてきた。
しかし研究チームは今回、かわいいと感じられる見た目以外の要素を探索し、“数と関係性”の効果に着目したとする。1粒で置かれているサクランボよりも2粒が房でつながったサクランボの方が、動物の赤ちゃんが1匹でいるよりも複数で楽しそうにじゃれている方が、かわいいと感じられると予想した研究チームは、複数の対象につながりがあるように見えると、人はその対象をよりかわいいと感じるのではないか、という仮説を立てたという。
そしてこの仮説を検証するため、3つの実験が実施された。
1つ目の実験では、女の子・男の子・サクランボ・ロボットを対象として、それぞれ単体(1個体)の場合、2個体がただ並んでいる場合、2個体がつながりを感じさせるように並んでいる場合の3種類の画像を用意し、どの程度かわいいと感じるかをWEBアンケートによって評価したとのこと。この実験には20歳代~60歳代の被験者201名(女性:99名、男性:101名、無回答:1名)が参加し、このうちデータに不備の無い162名のデータを分析したとする。
その結果どの対象においても、2個体がつながりを感じさせるように並んでいる場合が、単体のみ、または2つがただ並んでいる場合よりもかわいいと感じられることが示されたという。
-

ロボットの台数と見た目の関係性と、かわいいと思う程度の調査結果(出所:大阪大学)

次の実験では、ロボットが手を振って挨拶する様子の動画を、こちらも1台の場合、2台がただ並んでいる場合、2台がつながりを感じさせるよう並んでいる場合の3種類作成し、同様にどのくらいかわいいと感じるかをWEBアンケートにて評価。同実験には20歳代~60歳代の被験者202名(女性:100名、男性:100名、無回答:2名)が参加し、このうちデータに不備の無い179名のデータが分析された。
すると、動画であっても画像の場合と同じく、2つがつながりを感じさせるように並んでいる時が最もかわいいと感じられることが示されたとする。
そして3つ目の実験では、2つ目の動画での実験と同様に、ロボットが手を振って挨拶する動画を用いて、つながりを感じさせるロボットの台数を1台から10台まで変化させることで、かわいいと感じる程度をWEBアンケートにて評価を行った。そして実験に参加した20歳代~60歳代の200名の被験者(女性:98名、男性:102名)のうち、データに不備の無い152名のデータを分析したところ、2台の時がもっともかわいいと感じられることが示されたとのことだ。
研究チームは今回の成果について、ロボットという人工物であっても、複数台による関係性の表出を行うことでよりかわいいと感じてもらえることが示されたとする。また、工業製品であるロボットは個体の見た目を工夫してかわいさを高めることに限界があるものの、他のロボットと連携させることでよりかわいく親しみやすく感じられるようになるという今回の知見は、今後の社会にロボットを普及させていく際の1つの方向性を示すとしている。