「自律走行搬送ロボット(AMR)」は、製造業、物流・倉庫業、農業、小売業、接客業など、多くの業界で普及が拡大しています。AMRは、効率や生産性の向上、作業環境の安全性向上といった、いくつかの利点をもたらします。本稿では、AMRのアプリケーションと、モータとコントローラ、センサ、照明、通信インタフェースなど、AMRの構築に使用される各種コンポーネントの要件について説明し、それら複数の要件に対応するソリューションについても紹介したいと思います。
-
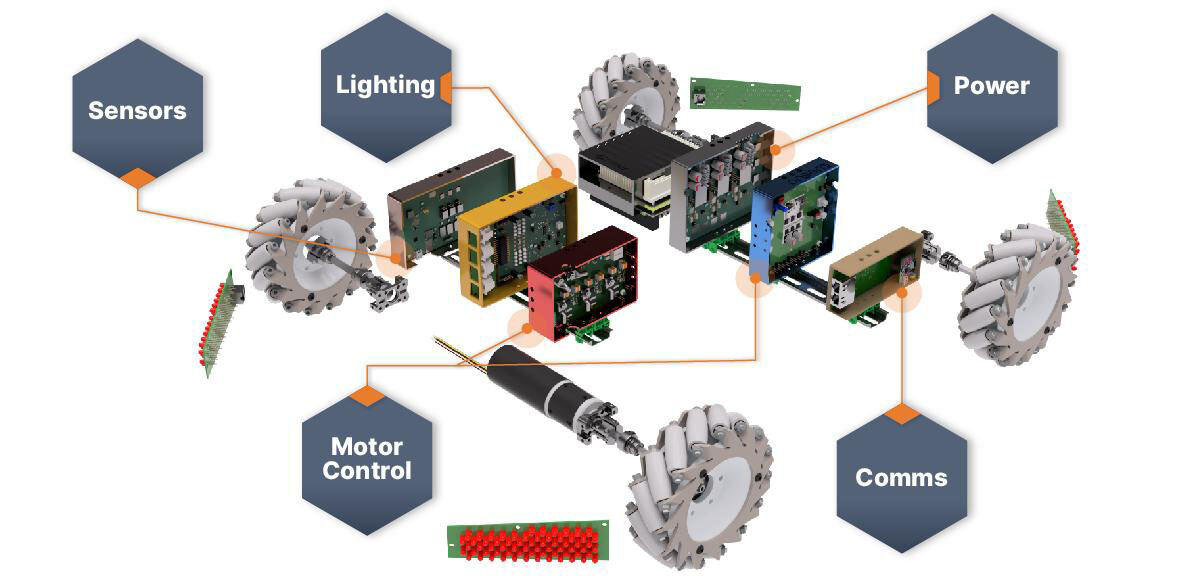
図1:オンセミ製品をベースにした自律走行搬送ロボット(AMR)向けソリューション

AMRのアプリケーションと利点
工場では、商品の運搬や品質管理手順の実施を支援するためにAMRを利用できます。AMRは、物流や倉庫での商品の積み下ろしに役立ちます。AMRが農場にもたらす利点は、作物の監視や土壌分析がより正確になり生産性が向上することです。小売業や接客業では、AMRを注文の配送や店舗の案内に利用することで、スタッフは接客に専念し、より良い顧客サービスを提供できるというメリットが得られます。AMRを導入しているアプリケーションや部門は、その基盤となる技術の発展に伴って成長し続けることでしょう。
AMRにおけるモータとモータ制御
AMRではモータ駆動アクチュエータが非常に重要であり、これによってアーム、リフト台、車輪を動かすことができます。アクチュエータを選択する際は、ブラシレスDC(BLDC)モータ、モータコントローラ、MOSFET、ユニバーサルコントローラボード(UCB)、ゲートドライバなどのコンポーネントを評価する必要があります。
BLDCモータは、高効率で騒音が少なく、メンテナンスも少なくてすみます(したがって、信頼性が高い)。こうした理由から、AMRではBLDCモータがよく使用されます。トルク対重量比が高いため、モータコントローラは精密な動作プロファイルでモータの速度と方向を制御できます。モータコントローラは、完全に統合する(組み込み制御アルゴリズムを内蔵)か、専用のマイクロコントローラユニット(MCU)を使用して、制御アルゴリズムを実装することができます。3相BLDCモータはAMRによく使用されており、モータの巻線間に接続された3つのハイサイドおよび3つのローサイドパワートランジスタで駆動すると、コイルに電流が流れて磁場が生じ、ロータを回転させることができます。転流アルゴリズムに基づいてこれらのスイッチに印加するパルス幅変調(PWM)信号を生成し、スイッチをオン/オフさせます。転流方式の例としては、正弦波転流、台形転流、フィールド指向制御などがあります。AMRで使用されるBLDCモータは通常48 V以下なので、AMRで使用されるモータ制御スイッチは一般にシリコンベースです。AMRの開発を迅速に行うために、オンセミは3相ゲートドライバ、高精度センスアンプ(4個)、ブートストラップダイオードを内蔵した24V~600Vの「ECS640A」 ecoSpin Arm Cortex BLDCモータコントローラなど、いくつかのBLDCモータ制御ソリューションを提供しています。また、低コストソリューションとして、「NCD83591」5V~60V 3相BLDCゲートドライバも揃えています。
オンセミは、「Xilinx Zynq-7000 SoC」をベースにしたBLDCモータ向けシステムオンモジュール(SoM)も提供しています。このUCBは、精密な制御を必要とするアプリケーションに最適で、人工知能(AI)機能の実装にも使用できます。また、AMRの高性能モータアプリケーション向けに、幅広い中耐圧(MV)MOSFETを提供しています。オンセミの最新T10シリコンMOSFETは、シールドゲートトレンチ技術をベースにしたものです。低オン抵抗(RDSon)、低ゲート電荷、およびオーバーシュートを低減してリンギングを抑える固有のスナバ回路のような機能を備えています。オンセミの40Vおよび80V T10 MOSFETは、それぞれ0.42mΩと1.5mΩというRDSonを実現しています。また、低ゲート電荷や電圧スパイクを低減するクラストップレベルのソフトリカバリ特性も備えています。
AMR用センサ
AMRは周囲の状況を監視して、それに対応しなければならないため、関連データを収集するのに、各種センサが必要になります。
AMRに一般的に導入されるセンサとしては、温度センサ、イメージセンサ、LiDAR(3Dマッピング用)、回転運動センサ、可視光通信(VLC)センサなどがあります。イメージセンサとイメージシグナルプロセッサにより視覚が得られるため、AMRは物体の検知と認識を行うことによって環境をナビゲートし、所定の動作を実行することができます。オンセミは、このアプリケーションに最適なグローバルシャッタおよびローリングシャッタ方式のイメージセンサを提供しています。
例えば、「AR0234CS」イメージセンサは、動きの速いシーン(120フレーム/秒)をフル解像度で正確にキャプチャするように最適化された、革新的なグローバルシャッタピクセル設計を採用しており、マシンビジョンやバーコードのスキャンに適した鮮明な画像を生成します。位置センサは、ロボットの車輪やその他の可動部品の回転を測定することにより、その位置と方向を正確に追跡できます。超音波センサと赤外線センサで離れた物体までの距離を測定して、AMRが障害物を検知し衝突を回避できるようにします。オンセミの「NCS32100」は、精度と速度を兼ね備えた産業用回転位置センサです。38mmのセンサを搭載し、6,000RPMで+/-50秒角の精度を達成します。低精度アプリケーションの場合は、10万RPMまでの速度に対応できます。この新しいデバイスは、誘導型位置センシングに特許取得済みのアプローチを採用しており、産業用アプリケーションやロボットアプリケーションに最適です。
AMRへの電力供給
電源および電源ツリー技術は、AMRのバッテリ寿命と動作能力に影響を与える重要な要素です。AMRの電源システムを選択する際の重要な性能特性とパラメータとしては、エネルギー密度、電圧および電流要件、効率、ソリューションサイズなどがあります。リチウムイオンバッテリは、エネルギー密度が高く寿命が長いため、AMRでは一般的な選択肢となっています。パワーマネジメントユニットは、バッテリから他のコンポーネントへの電力の流れを調整し、他方、スイッチングコンバータと電圧レギュレータで構成される電源ツリーは、コンポーネントが適切な電圧および電流レベルを確実に受け取れるようにします。一例を挙げると、「FAN65008B」同期PWM降圧レギュレータは、98%のピーク効率を達成し、負荷に一定のDC10Aを供給しながら48V入力を28V出力に降圧します。
「NCP1632」力率コントローラ(PFC)、「NCP1399」 LLCコントローラ、「NCP4307」同期整流器コントローラ(SRC)は連携して、最大1kWの電源においてAC-DC変換時の効率を最適化します。
オンセミのEliteSiCシリコンカーバイドMOSFETは、標準3kWを超える大電力アプリケーションでのAC-DCおよびDC-DC電力変換に最適です。AMRのバッテリを充電するには、家庭用または産業用AC電源を、使用可能な中電圧DC出力に変換する必要があります。AC-DCフロントエンドとDC-DCコンバータの1次側は、どちらもEliteSiC FETを使用することでメリットが得られます。DC-DCコンバータの2次側には、スイッチング用に最適化されたオンセミのトレンチMOSFETを使用できます。
照明
発光ダイオード(LED)などの照明技術は、AMRが多様な環境でナビゲート、通信、動作する上で重要です。また、照明を使用して、信号を送信したり、AMRの状況や方向を通知したりすることもできます。AMR用の照明技術を選択する際に考慮すべき性能特性およびパラメータには、輝度、色温度、消費電力などがあります。LEDコントローラおよびドライバは、LEDに流れる電流を監視しており、LEDが特定の強度と波長の光を放射するための重要なコンポーネントです。LEDドライバ回路は、ハイサイドおよびローサイドのパワーMOSFETを使用して、LED電流のオン/オフを行い、過電圧および過電流状態から保護します。また、LEDドライバ回路の安定性も確保します。
オンセミの「NCV7685」 LEDリニア電流ドライバと「NCL31000」は、AMRの照明アプリケーションに最適なインテリジェントLEDドライバです。「NCV7685」は、12個のリニアプログラマブル定電流源と共通リファレンスを搭載し、128の異なるPWM可変デューティサイクルレベルを実現しています。「NCL31000」は、広帯域幅アナログおよびPWM調光(ゼロ電流まで)をサポートする高効率の降圧LEDドライバ、2つの補助DC-DCコンバータ、入出力電流および電圧、LED温度、DC-DC電圧を監視する診断機能を備えています。
「NCL31000」は、最大10kb/sの単方向データを送信するためのキャリアとして可視光を使用するVLC(可視光通信)をサポートしています。VLCにより、AMRは他の機器や人間とセキュアな通信を行うことができます。可視光スペクトルは430THz~790THzであるため、VLCはBluetooth Low Energy(Bluetooth LE)、Zigbee、UWB(超広帯域無線)、Wi-Fiなどの近傍のワイヤレス技術に影響を与えることはありません。VLCは本質的に見通し線に制限されるためセキュアです。
倉庫用アプリケーションでのAMRのナビゲーションには、UWB、Bluetooth LE(AoA/AoD)、Wi-Fiによる屋内測位システム(IPS)が有効です。ただし、時にはRF(無線周波数)の輻輳や干渉が、IPSに影響を及ぼす可能性があります。これを軽減するために、VLCを使用し、VLCを天井照明器具のグリッドに導入することで、既存のRF IPSを補完できます。この場合、各天井照明器具は固有のID番号を送信します。AMRが各照明の位置と固有IDを含むフロアプランのデータベースを備えていれば、以下の図2に示すように、AMRは天井に向けた簡易なフォトダイオードで自己ナビゲートできます。
-
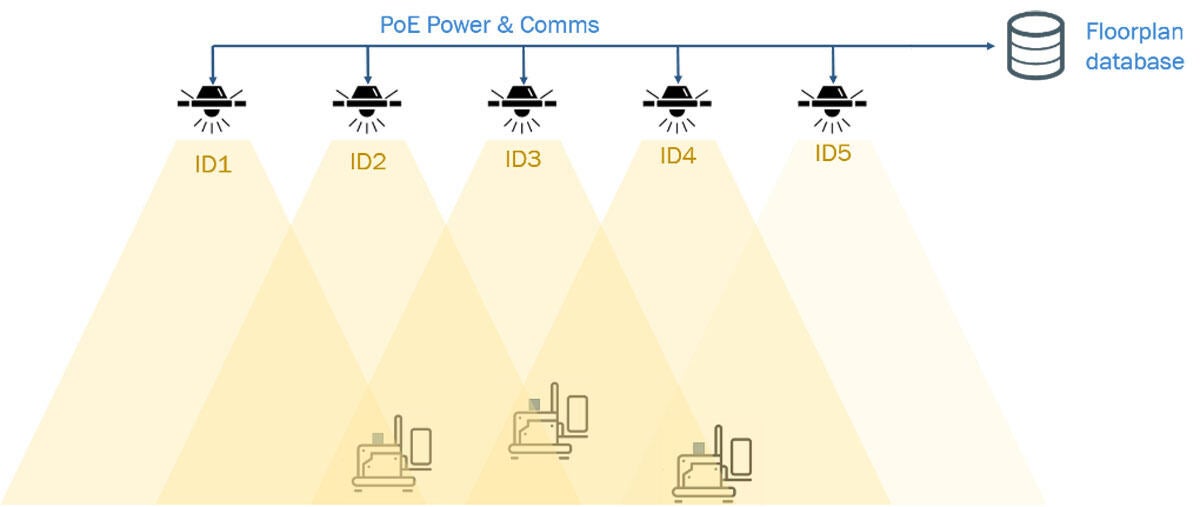
図2:屋内測位システム(IPS)にVLCを使用したAMR

通信
AMRにはワイヤレス通信技術が不可欠であり、データの送信やコマンドの受信により、他の機器およびシステムとの間で通信や情報のやり取りを行うことができます。
AMR用の通信技術を選択する際に考慮すべき性能特性およびパラメータには、動作範囲、データレート、消費電力、セキュリティなどがあります。動作範囲は、周囲環境内にある他の機器やシステムと適切なデータレートで、確実に通信できることが必要です。消費電力は、バッテリ寿命を可能な限り長く維持するために、十分低くなければなりません。同時に、AMRのデータやコマンドがアクセスされたり破損したりしないように、セキュリティが非常に重要です。
Bluetooth LEは低消費電力用に設計されたワイヤレス通信技術なので、バッテリ駆動機器に最適です。AMRと他の機器との間で、センサデータや制御信号を送信するための幅広いデータ転送レートがサポートされています。Bluetooth LEは屋内測位システムでも使用できるため、AMRは動的環境でナビゲートできます。オンセミのRSL15は、Bluetooth LEワイヤレスアプリケーションを簡単に実装できるBluetooth 5.2認証取得済みトランシーバで、AoA(到着角)とAoD(出発角)の主要機能をサポートし、高精度の屋内測位が可能です。高度に統合された無線システムオンチップ(SoC)により、システムのサイズとバッテリ寿命が最適化されています。Arm Cortex-M33プロセッサと2.4GHzトランシーバを搭載し、Bluetooth LE 5.2と2.4 GHzカスタムプロトコルをサポートしています。
個々のAMRには、オンボード中央コンピュータと個別モータコントローラ、照明コントローラ、センサとの間でのリアルタイム制御のために、内部有線デジタル通信も必要です。CAN(2Mbps)またはCAN-FD(5Mbps)は、長年にわたって選択されてきた代表的なプロトコルです。どちらのプロトコルもUTP(非シールドツイストペア)ケーブルを介して通信し、個々のノードは、デイジーチェーンやマルチドロップトポロジに構成してケーブルの重量とコストを削減できます。
Ethernet Allianceが最近発表した10BASE-T1S(10Mbps)イーサネットIPベースデジタル通信プロトコルも、最長25mのUTPまたはシングルペアイーサネット(SPE)で最小8ノードを備えたデイジーチェーンやマルチドロップトポロジで通信することができます。CANやCAN-FDに対する10BASE-T1Sの主な利点は、データレートがより高速で、中枢部からエッジノードまでオールIPベースのイーサネット通信プロトコルドメインであり、人工知能(AI)や機械学習の利用が容易になることです。
オンセミの10BASE-T1S産業用イーサネットトランシーバ「NCN26010」により、既存のツイストペア線を使用した産業用アプリケーション向けマルチドロップイーサネット通信が可能になります。このデバイスは、IEEE 802.3cgに準拠し、メディアアクセスコントローラ(MAC)、PLCA調整サブレイヤ(RS)、産業用マルチドロップイーサネット用に設計された10BASE-T1S PHYを備えています。1本の非シールドツイストペア線を介してデータを送受信するためのすべての物理層機能を提供し、Open Alliance MACPHY SPIプロトコルを使用してホストMCUと通信できます。
まとめ
AMRのアプリケーションは、さまざまな業界で成長し続けています。しかし、AMRは複雑なシステムであり、自律的に高い信頼性で、安全に動作させるには、複数の異なる技術を統合する必要があります。AMRの成功は、設計段階で最適な技術を選択できるかどうかにかかっています。
本記事はonsemi執筆の技術解説記事「Design Considerations and Solutions for Autonomous Mobile Robots」を翻訳したものとなります
著者プロフィール
Hunter Frebergonsemi
Technical Marketing Engineer
Bob Card
onsemi
Marketing Manager ASG