



新エネルギー・産業技術総合開発機構(NEDO)、慶應義塾大学(慶大)、大林組の3者は9月12日、NEDOの「官民による若手研究者発掘支援事業」(以下「若サポ」)の一環で、遠隔で力触覚を再現する技術(リアルハプティクス)を応用し、危険が伴う山岳トンネルの掘削面(切羽)直下での火薬の装填・結線作業を遠隔化・自動化するシステムの開発に取り組んでおり、今回、自動火薬装填システムの開発に成功したことを共同で発表した。
同成果は、慶大 理工学部の野崎貴裕准教授、大林組の共同研究チームによるもの。詳細は、9月11日から15日まで広島で開催される土木学会第78回年次学術講演会や11月21日・22日に開催の土木学会第33回トンネル工学研究発表会にて発表の予定。また、10月17日~20日に幕張メッセで開催される「CEATEC 2023」や、11月29日から12月2日まで東京ビッグサイトおよびオンラインで開催される「2023国際ロボット展」への出展・デモンストレーションを予定しているとした。
-

自動火薬装填・結線システムイメージ(出所:大林組Webサイト)

山岳トンネル工事における重大災害の多くは、地山を保持するアーチ状のH型の鋼材である鋼製支保工を設置するための「支保工建て込み作業」と、切羽(きりは)直下(切羽の上面部分(天端)から45度以内の範囲)での「火薬の装填・結線作業」で発生しているという。
両作業のうち、重機を使用する支保工建て込みなどは遠隔化・自動化が進んでいるとする。問題は、もう一方の火薬の装填・結線作業だ。同作業は、火薬や雷管などの危険性が高い材料や細かい脚線を取り扱うことから、繊細な力加減や手指の感覚を必要とする。現在は、「山岳トンネル工事の切羽における肌落ち災害防止対策に係るガイドライン(厚生労働省)」に基づき、安全対策が行われながら手作業で施工されているが、さらなる作業の安全性と生産性の向上が求められているとする。
-

(左)火薬装填作業の概要。(右)装填ロボットの拡大図(出所:慶大プレスリリースPDF)

そこで、NEDOの若サポの一環として、野崎准教授と大林組の共同研究チームは、遠隔で力触覚を再現する技術(リアルハプティクス)を応用して、切羽直下での火薬の装填・結線作業を遠隔化・自動化する研究を進めてきたという。
今回開発された自動火薬装填システムは、(1)遠隔装填技術と(2)遠隔装填技術で伝送される力触覚のデータを利用した自動装填技術で構成される。同システムにより、遠隔操作における作業の安全性向上と、自動化による生産性向上が図れるとしている。
まず(1)については、トンネル外の安全な場所に設置されたリモコン側(作業者が操作する込め棒を模したもの)と、トンネル内の切羽で実際に作業するロボット側(ドリルジャンボに搭載するロボットアームに装着された装填ロボット)で構成される。今回は、装薬孔の孔壁と装填ロボットの接触状況や、火薬を装填した際の反力などをロボット側からリモコン側に伝える技術が開発された。
次に(2)では、同技術で伝送されるロボット側の火薬装填時のデータと、リモコン側の遠隔操作データを活用した自動装填技術が開発された。これにより繰り返し作業が自動化され、作業の効率化が可能としている。具体的な操作としては、作業者がロボット側から送信される映像を視覚で確認しながら、込め棒やパイプの抵抗が力触覚として再現されたリモコン側の操作を行う。それにより、安全な場所から実際の装薬孔に火薬を装填しているかのような感触で作業を行えるとした。ロボット側では、リモコン側で動かした込め棒やパイプの角度、力の入れ具合がリアルタイムに再現される仕組みだ。
-
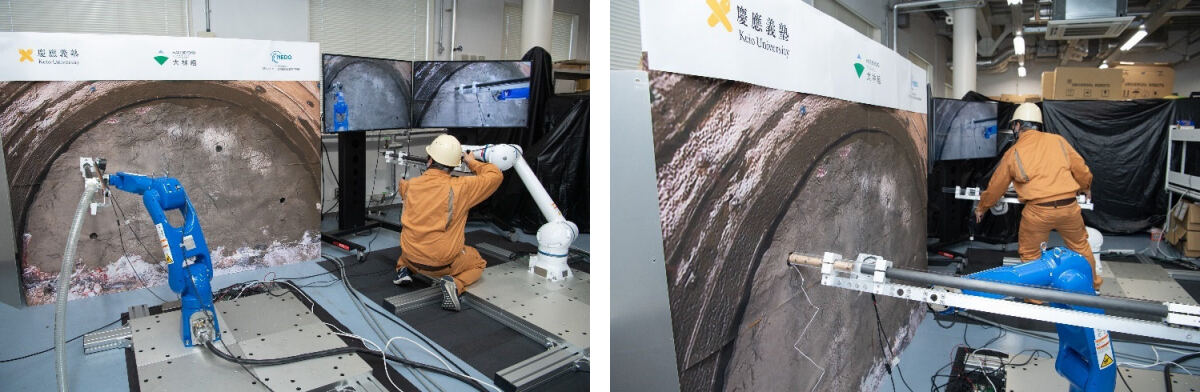
遠隔装填技術の要素試験(出所:慶大プレスリリースPDF)

若サポ事業にて研究チームは今後、以下の3点を進めることで、一連の技術の現場適用を目指すという。
- 開発された自動火薬装填システムのトンネル現場での実証試験
- リアルハプティクス技術を搭載した結線ロボットにより切羽との接触を感知しながら自動で脚線を結線する自動結線システム(特許出願中)の要素試験
- 形状変化への自律的な対応を応用させた装填・結線システムの自律化
リアルハプティクスは位置や力といった動作情報を記録し、再現することが可能だ。なお、3者は今後、同技術を応用することでトンネル掘削作業の無人化を実現し、安全かつ効率的な働き方を目指した技術の開発を進めるとしている。













