エプソンアヴァシスと信州大学(信大)の両者は2月9日、ロボット自身が作業の手順を考え出し、ユーザーが指定した通りに物品を配置することなどを可能にする知能システム(AI)を開発したことを共同で発表した。
同成果は、エプソンアヴァシス、信大 工学部のアーノード・ソービ准教授、同・山崎公俊教授らの共同研究チーム(信大工学部 人工知能共同研究講座)によるもの。詳細は、ロボット工学とオートメーションに関する全般を扱う学術誌「IEEE Robotics and Automation Letters」に掲載された。
ヒトは、大小さまざまな目標を達成するため、緻密なものから意識しないレベルまで何らかの行動計画を立てて実行している。その中では、次の認知機能が中心的な役割を果たしていることが考えられるという。
- アフォーダンス(可能行動)認識:ある状況において自分が取れる行動を認識する機能
- 行動後の状況の予測:その行動を取った結果、状況がどのように変化するのかを予測する機能
そこで研究チームは今回、これらの機能を備える新たなAIの構築を目指したとする。
-
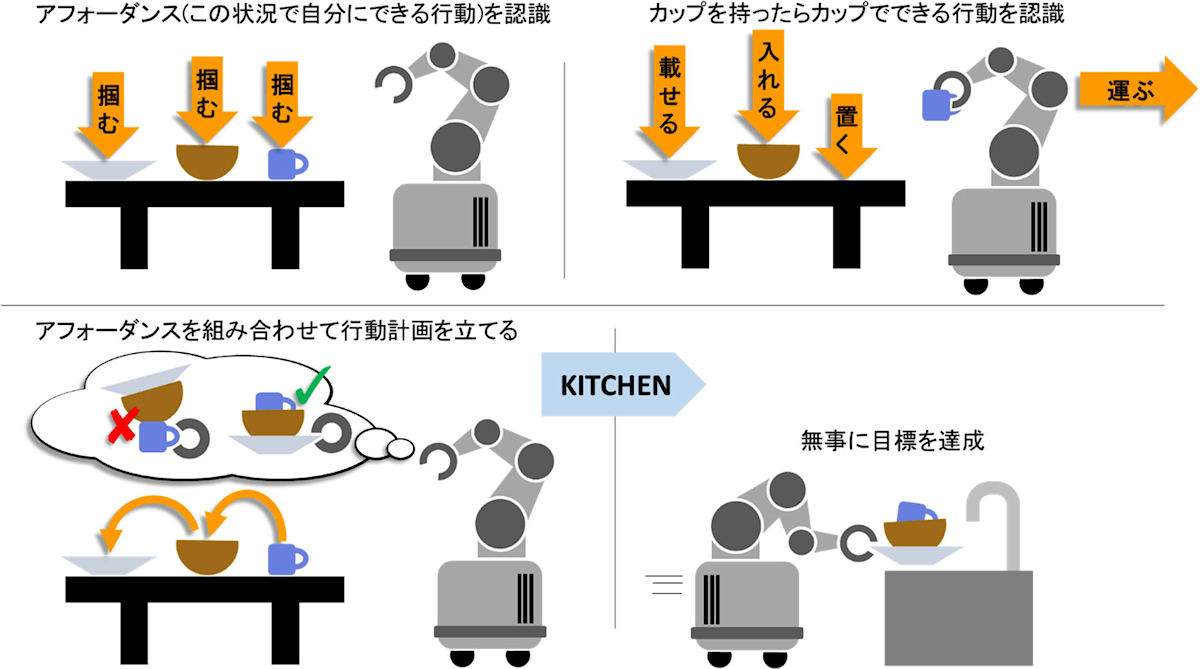
今回開発された方式の模式図。アフォーダンスを認識し、取れる行動を可能な限り予測し、その中から目標を達成できるルートを選び出すことで、目標を達成する(出所:信大プレスリリースPDF)

AIが動作する流れは次の通りだ。まず、カメラ映像を通して現在の状況を把握し、そこでアフォーダンスを認識する。たとえば手が届く範囲にカップがあれば、「カップを掴む」というアフォーダンスを認識するという。そして、実際にカップを掴んだ後は、そのカップを持った状況でのアフォーダンスを認識する。たとえば、「カップをお皿に載せる」や「カップを違う場所へ運ぶ」などだ。
アフォーダンスを利用して行動し目標を達成するには、それぞれの行動がもたらす効果、つまり行動後の状況を予測できる必要がある。多くの従来手法では、この状況予測は設計者によって定められたルールに基づいて行われている。たとえば、"XをYに載せる・XがYに載っている"のようなルールだ。しかし現実世界は複雑であり、このようなシンプルなルールで完全に記述することは非常に困難だ。たとえば上述した例なら、不安定な置き方でXを置いてしまった場合、XがYから転げ落ちるなどによりルールに沿わない状況が生じる可能性がある。